Our recently developed planner EGO-Swarm is an evolution from EGO-Planner.
It is more robust and safe, and therefore, is more recommended to use.
If you have only one drone, just set the drone_id to 0 in EGO-Swarm's launch files.
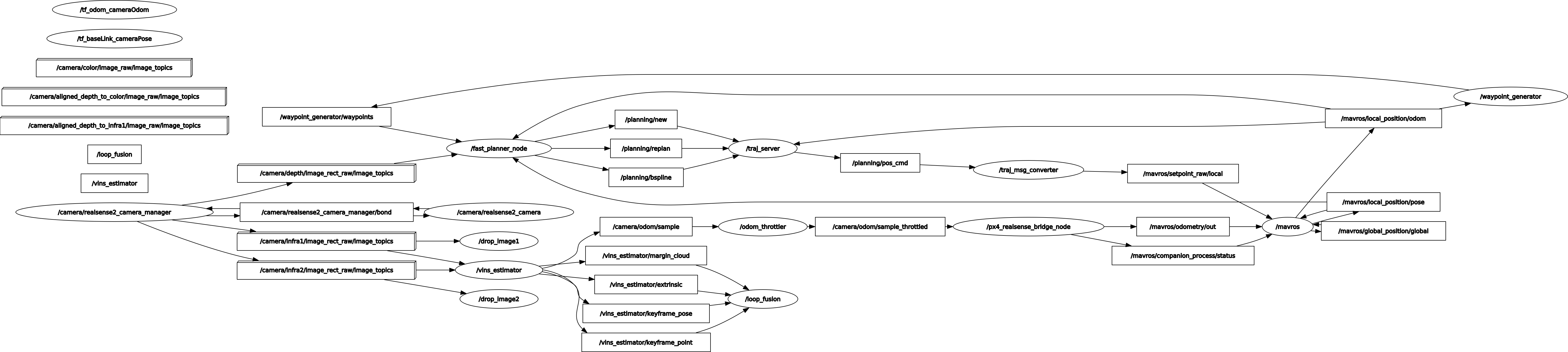
Of course, some topic names are changed from EGO-Planner, check it using rqt_graph and rosnode info <package name>.
Compiling tests passed on ubuntu 16.04, 18.04 and 20.04 with ros installed. You can just execute the following commands one by one.
sudo apt-get install libarmadillo-dev
git clone https://github.com/ZJU-FAST-Lab/ego-planner.git
cd ego-planner
catkin_make
source devel/setup.bash
roslaunch ego_planner simple_run.launch
If your network to github is slow, We recommend you to try the gitee repository https://gitee.com/iszhouxin/ego-planner. They synchronize automatically.
If you find this work useful or interesting, please kindly give us a star ⭐, thanks!😀
-
The framework of this repository is based on Fast-Planner by Zhou Boyu who achieves impressive proformance on quadrotor local planning.
-
The L-BFGS solver we use is from LBFGS-Lite. It is a C++ head-only single file, which is lightweight and easy to use.
-
The map generated in simulation is from mockamap by William Wu.
-
The hardware architecture is based on an open source implemation from Teach-Repeat-Replan.
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors
EGO-Planner is a lightweight gradient-based local planner without ESDF construction, which significantly reduces computation time compared to some state-of-the-art methods . The total planning time is only around 1ms and don't need to compute ESDF.




Video Links: YouTube, bilibili (for Mainland China)
EGO-Planner: An ESDF-free Gradient-based Local Planner for Quadrotors, Xin Zhou, Zhepei Wang, Chao Xu and Fei Gao (Accepted by RA-L). arXiv Preprint, IEEE Xplore, and IEEE Spectrum report.
Requirements: ubuntu 16.04, 18.04 or 20.04 with ros-desktop-full installation.
Step 1. Install Armadillo, which is required by uav_simulator.
sudo apt-get install libarmadillo-dev
Step 2. Clone the code from github or gitee. This two repositories synchronize automaticly.
From github,
git clone https://github.com/ZJU-FAST-Lab/ego-planner.git
Or from gitee,
git clone https://gitee.com/iszhouxin/ego-planner.git
Step 3. Compile,
cd ego-planner
catkin_make -DCMAKE_BUILD_TYPE=Release
Step 4. Run.
In a terminal at the ego-planner/ folder, open the rviz for visuallization and interactions
source devel/setup.bash
roslaunch ego_planner rviz.launch
In another terminal at the ego-planner/, run the planner in simulation by
source devel/setup.bash
roslaunch ego_planner run_in_sim.launch
Then you can follow the gif below to control the drone.

We recommend using vscode, the project file has been included in the code you have cloned, which is the .vscode folder. This folder is hidden by default. Follow the steps below to configure the IDE for auto code completion & jump. It will take 3 minutes.
Step 1. Install C++ and CMake extentions in vscode.
Step 2. Re-compile the code using command
catkin_make -DCMAKE_BUILD_TYPE=Release -DCMAKE_EXPORT_COMPILE_COMMANDS=Yes
It will export a compile commands file, which can help vscode to determine the code architecture.
Step 3. Launch vscode and select the ego-planner folder to open.
code ~/<......>/ego-planner/
Press Ctrl+Shift+B in vscode to compile the code. This command is defined in .vscode/tasks.json. You can add customized arguments after "args". The default is "-DCMAKE_BUILD_TYPE=Release".
Step 4. Close and re-launch vscode, you will see the vscode has already understood the code architecture and can perform auto completion & jump.
Packages in this repo, local_sensing have GPU, CPU two different versions. By default, they are in CPU version for better compatibility. By changing
set(ENABLE_CUDA false)
in the CMakeList.txt in local_sensing packages, to
set(ENABLE_CUDA true)
CUDA will be turned-on to generate depth images as a real depth camera does.
Please remember to also change the 'arch' and 'code' flags in the line of
set(CUDA_NVCC_FLAGS
-gencode arch=compute_61,code=sm_61;
)
in CMakeList.txt. If you encounter compiling error due to different Nvidia graphics card you use or you can not see proper depth images as expected, you can check the right code via link1 or link2.
Don't forget to re-compile the code!
local_sensing is the simulated sensors. If ENABLE_CUDA true, it mimics the depth measured by stereo cameras and renders a depth image by GPU. If ENABLE_CUDA false, it will publish pointclouds with no ray-casting. Our local mapping module automatically selects whether depth images or pointclouds as its input.
For installation of CUDA, please go to CUDA ToolKit
The computation time of our planner is too short for the OS to increase CPU frequency, which makes the computation time tend to be longer and unstable.
Therefore, we recommend you to manually set the CPU frequency to the maximum. Firstly, install a tool by
sudo apt install cpufrequtils
Then you can set the CPU frequency to the maximum allowed by
sudo cpufreq-set -g performance
More information can be found in http://www.thinkwiki.org/wiki/How_to_use_cpufrequtils.
Note that CPU frequency may still decrease due to high temperature in high load.
We modified the ros-relasense driver to enable the laser emitter strobe every other frame, allowing the device to output high quality depth images with the help of emitter, and along with binocular images free from laser interference.

This ros-driver is modified from https://github.com/IntelRealSense/realsense-ros and is compatible with librealsense2 2.30.0. Tests are performed on Intel RealSense D435 and D435i.
Parameter emitter_on_off is to turn on/off the added function.
Note that if this function is turned on, the output frame rate from the device will be reduced to half of the frame rate you set, since the device uses half of the stream for depth estimation and the other half as binocular grayscale outputs.
What's more, parameters depth_fps and infra_fps must be identical, and enable_emitter must be true as well under this setting.
The driver of librealsense2 2.30.0 should be installed explicitly. On a x86 CPU, this can be performed easily within 5 minutes. Firstly, remove the currently installed driver by
sudo apt remove librealsense2-utils
or manually remove the files if you have installed the librealsense from source. Then, you can install the library of version 2.30.0 by
sudo apt-key adv --keyserver keys.gnupg.net --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
For ubuntu 16.04
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo xenial main" -u
For ubuntu 18.04
sudo add-apt-repository "deb http://realsense-hw-public.s3.amazonaws.com/Debian/apt-repo bionic main" -u
Then continue with
sudo apt-get install librealsense2-dkms
sudo apt install librealsense2=2.30.0-0~realsense0.1693
sudo apt install librealsense2-gl=2.30.0-0~realsense0.1693
sudo apt install librealsense2-utils=2.30.0-0~realsense0.1693
sudo apt install librealsense2-dev=2.30.0-0~realsense0.1693
sudo apt remove librealsense2-udev-rules
sudo apt install librealsense2-udev-rules=2.30.0-0~realsense0.1693
Here you can varify the installation by
realsense-viewer
If everything looks well, you can now compile the ros-realsense package named modified_realsense2_camera.zip by catkin_make, then run ros realsense node by
roslaunch realsense_camera rs_camera.launch
Then you will receive depth stream along with binocular stream together at 30Hz by default.
The source code is released under GPLv3 license.
We are still working on extending the proposed system and improving code reliability.
For any technical issues, please contact Xin Zhou ([email protected]) or Fei GAO ([email protected]).
For commercial inquiries, please contact Fei GAO ([email protected]).








































































































































{kind=link}
{kind=link}
{kind=link}