- Nov. 26, 2022 - Lidar and IMU data is now available on the download page.
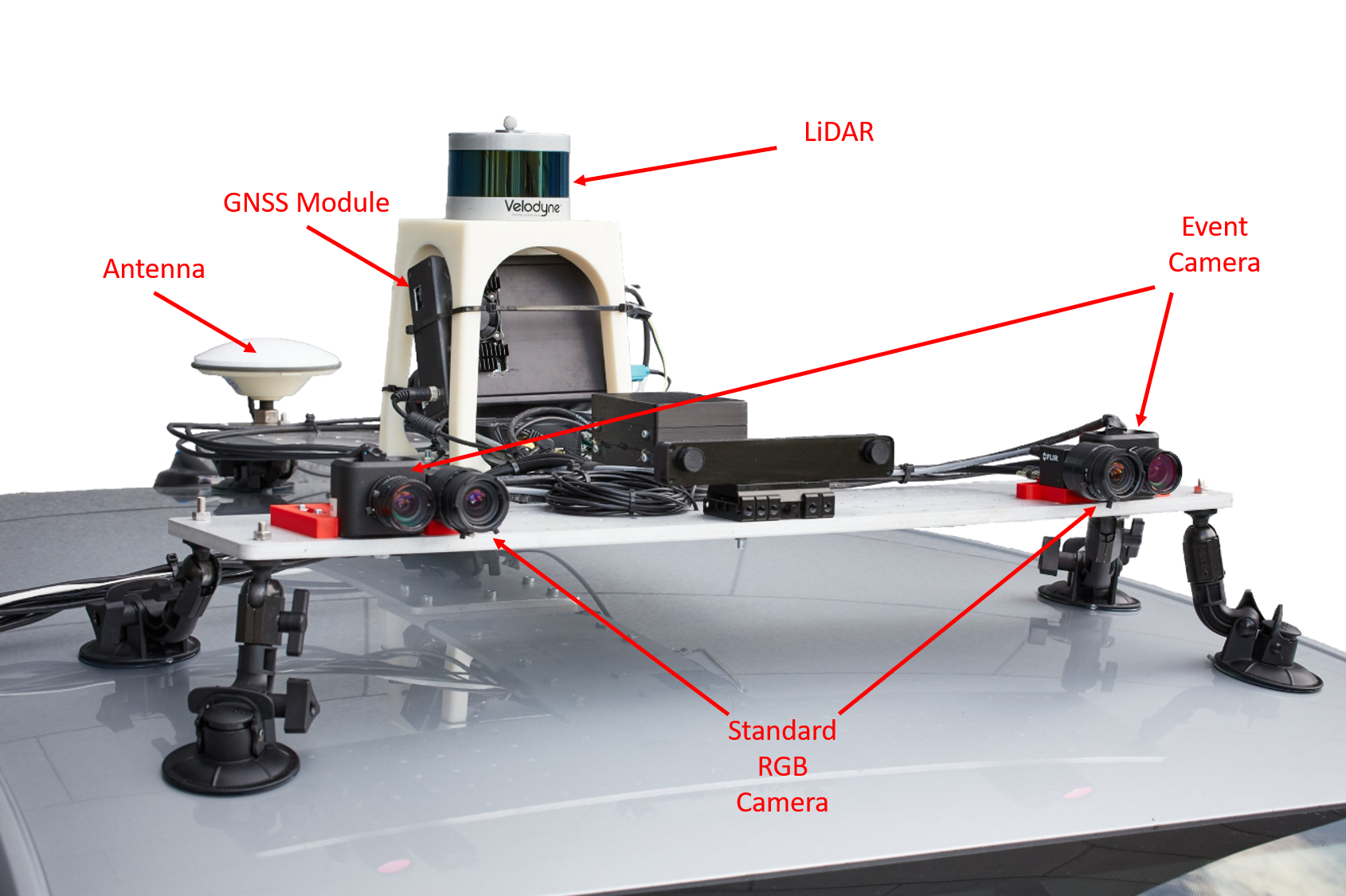
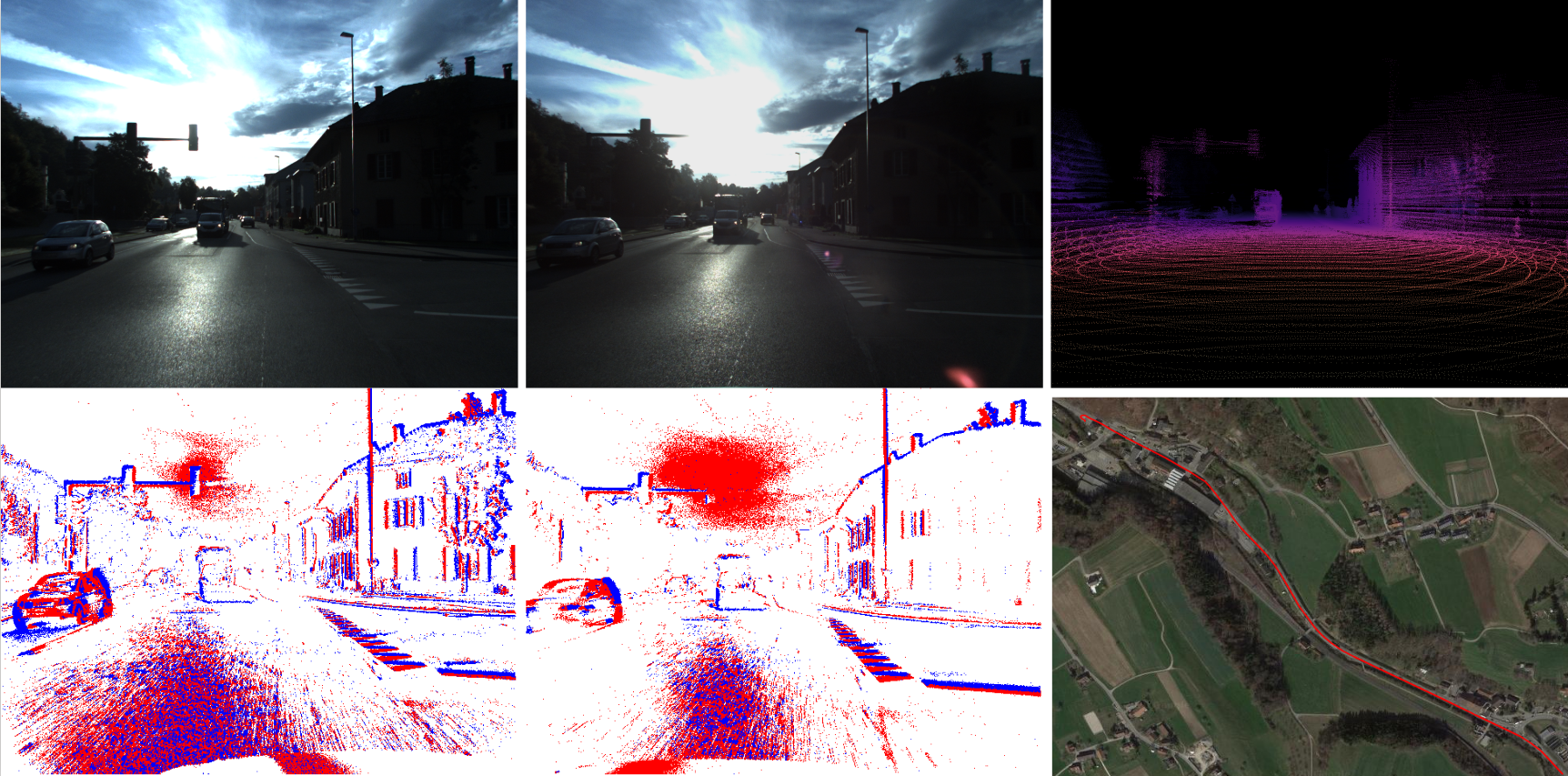
DSEC: A Stereo Event Camera Dataset for Driving Scenarios
This is code accompanying the dataset and paper by Mathias Gehrig, Willem Aarents, Daniel Gehrig and Davide Scaramuzza
Visit the project webpage to download the dataset.
If you use this code in an academic context, please cite the following work:
@InProceedings{Gehrig21ral,
author = {Mathias Gehrig and Willem Aarents and Daniel Gehrig and Davide Scaramuzza},
title = {{DSEC}: A Stereo Event Camera Dataset for Driving Scenarios},
journal = {{IEEE} Robotics and Automation Letters},
year = {2021},
doi = {10.1109/LRA.2021.3068942}
}and
@InProceedings{Gehrig3dv2021,
author = {Mathias Gehrig and Mario Millh\"ausler and Daniel Gehrig and Davide Scaramuzza},
title = {E-RAFT: Dense Optical Flow from Event Cameras},
booktitle = {International Conference on 3D Vision (3DV)},
year = {2021}
}In this repository we provide code for loading data and verifying the submission for the benchmarks. For details regarding the dataset, visit the DSEC webpage.
- Clone
git clone [email protected]:uzh-rpg/DSEC.git- Install conda environment to run example code
conda create -n dsec python=3.8
conda activate dsec
conda install -y -c anaconda numpy
conda install -y -c numba numba
conda install -y -c conda-forge h5py blosc-hdf5-plugin opencv scikit-video tqdm prettytable imageio
# only for dataset loading:
conda install -y -c pytorch pytorch torchvision cudatoolkit=10.2
# only for visualilzation in the dataset loading:
conda install -y -c conda-forge matplotlibWe provide a python script to ensure that the structure of the submission directory is correct. Usage example:
python check_disparity_submission.py SUBMISSION_DIR EVAL_DISPARITY_TIMESTAMPS_DIRwhere EVAL_DISPARITY_TIMESTAMPS_DIR is the path to the unzipped directory containing evaluation timestamps. It can downloaded on the webpage or directly here.
SUBMISSION_DIR is the path to the directory containing your submission.
Follow the instructions on the webpage for a detailed description of the submission format.
We provide a python script to ensure that the structure of the submission directory is correct. Usage example:
python check_optical_flow_submission.py SUBMISSION_DIR EVAL_FLOW_TIMESTAMPS_DIRwhere EVAL_FLOW_TIMESTAMPS_DIR is the path to the unzipped directory containing evaluation timestamps. It can downloaded on the webpage or directly here.
SUBMISSION_DIR is the path to the directory containing your submission.
Follow the instructions on the webpage for a detailed description of the submission format.























































































































