TU/e Robotics image_recognition
![]()
![]()
Packages for image recognition - Robocup TU/e Robotics
Package status & Description
| Package | Build status Xenial Kinetic x64 | Description |
|---|---|---|
| image_recognition | Meta package for all image_recognition packages. | |
| image_recognition_analysis | analysis for image recognition | |
| image_recognition_color_extractor | Extract dominant colors from images | |
| image_recognition_jetson | ROS wrapper for Jetson Inference (https://github.com/dusty-nv/jetson-inference) for running inference using TensorRT. | |
| image_recognition_keras | ROS wrappers for Keras neural nets. | |
| image_recognition_msgs | Interface definition for image recognition | |
| image_recognition_openface | ROS wrapper for Openface (https://github.com/cmusatyalab/openface) to detect and recognize faces in images. | |
| image_recognition_openpose | ROS wrapper for Openpose (https://github.com/CMU-Perceptual-Computing-Lab/) for getting poses of 2D images. | |
| image_recognition_pytorch | ROS wrapper around a PyTorch model for (https://github.com/Nebula4869/PyTorch-gender-age-estimation) for getting age & gender estimations on faces | |
| image_recognition_rqt | RQT tools with helpers testing this interface and training/labeling data. | |
| image_recognition_skybiometry | ROS wrapper for Skybiometry (https://skybiometry.com/) for getting face properties of a detected face, e.g. age estimation, gender estimation etc. | |
| image_recognition_tensorflow | Object recognition with use of Tensorflow. The user can retrain the top layers of a neural network to perform classification with its own dataset as described in this tutorial. | |
| image_recognition_tensorflow_rqt | RQT tools for retraining a Tensorflow neural network. | |
| image_recognition_util | Utils shared among image recognition packages |
How to
Object recognition
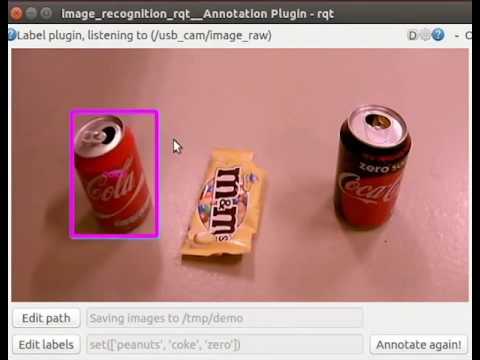
Step 1: label images with the image_recognition_rqt#annotation-plugin
Step 2: train a neural network with the image_recognition_tensorflow_rqt

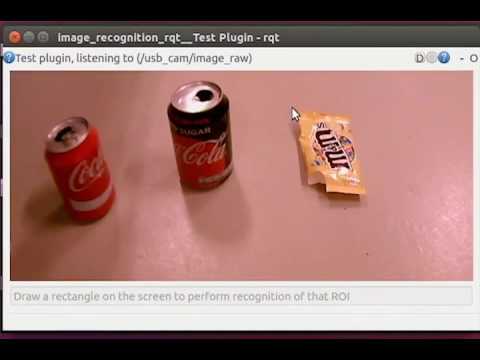
Step 3: predict labels for new data with the image_recognition_rqt#test-plugin
Face recognition
See the tutorial at image_recognition_openface

Installation
Clone the repo in your catkin_ws:
cd ~/catkin_ws/src
git clone https://github.com/tue-robotics/image_recognition.git
Build your catkin workspace cd ~/catkin_ws catkin_make

![dependabot[bot] avatar](https://avatars.githubusercontent.com/in/29110?v=4 "dependabot[bot]")
























































































