- Matlab
- iDynTree: a library of robots dynamics algorithms for control, estimation and simulation.
- Install the robotology-superbuild.
Follow installation instructions here. The required library iDynTree will be automatically install via the superbuild.
git clone https://github.com/robotology/robotology-superbuild.git mkdir build cd build - Enable the Matlab bindings for iDynTree.
cd robotology-superbuild/build/src/iDynTree cmake .. ccmake . ROBOTOLOGY_ENABLE_MATLAB ON IDYNTREE_USES_MATLAB ON Matlab_ROOT_DIR root-to-your-application-Matlab make install- In your
.bashrcaddexport Matlab_ROOT_DIR="root-to-your-application-Matlab". - Open Matlab and browse to the folder
your-path/robotology-superbuild/build. - Run the script
Startup-robotology-superbuild.m.
- In your
- A data folder (e.g.,
data) containing your dataset, per each subject (e.g.,S00X) with- a
.mvnxfile for the human whole-body acquisition. - a
.matfile with markers acquisition for the hand (if you wantto build the model with articulated hands)
- a
- The folder
templatescontainig human templates for URDF models.
-
Move to the folder where you clone the repo.
-
Run the script
computeHumanURDF.m -
Fill the dialog box with required info.

-
If you do not want to include the articulad model of the hand into the URDF, insert 'n'. This means that the hand will be represented only by a unique rigid box in the URDF.
-
If you want to include the articulad model of the hand into the URDF, insert 'y'. This will open another dialog box, as follows:
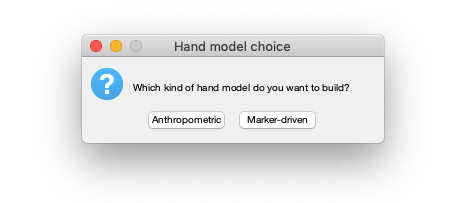
- With the second dialog box you can choose if building
- an anthropometric model of the hand. This model does not require the markers acquisition, but only the
.mvnx. - a marker-driven model of the hand. This model also requires an acquisition of markers properly positioned on top of the hand with a standard optical cameras tracking (e.g., Vicon).
- an anthropometric model of the hand. This model does not require the markers acquisition, but only the
Given
- the subject number (e.g., 1)
- the subject mass (e.g., 60)
- the subject height (e.g.,1.80)
| OPT | 48 DOF | 66 DOF | ANTHROPOMETRIC HAND | MARKER-DRIVEN HAND | GENERATED URDF |
|---|---|---|---|---|---|
| 1 | ✔️ | 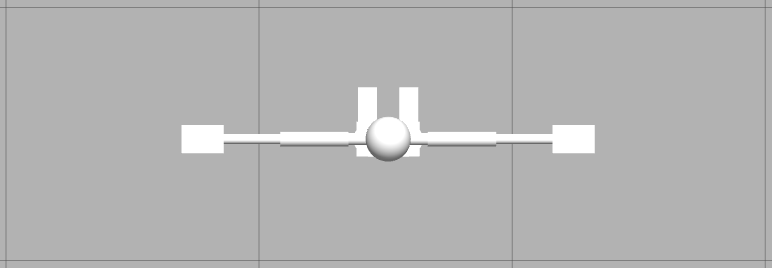 |
|||
| 2 | ✔️ |  |
|||
| 3 | ✔️ | ✔️ | 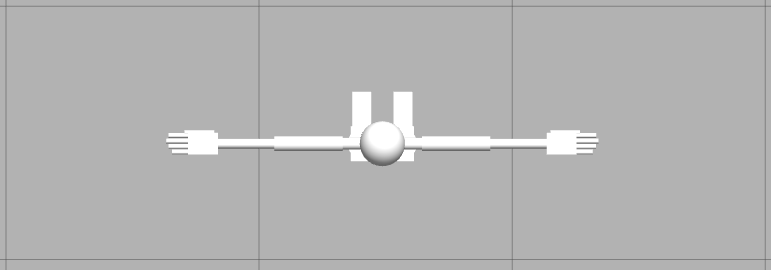 |
||
| 4 | ✔️ | ✔️ |  |



































