robotis-git / turtlebot3 Goto Github PK
View Code? Open in Web Editor NEWROS packages for Turtlebot3
Home Page: http://turtlebot3.robotis.com
License: Apache License 2.0
ROS packages for Turtlebot3
Home Page: http://turtlebot3.robotis.com
License: Apache License 2.0
Hi,
I have been getting the following error messages every time when i launched turtlebot3 on my burger since i updated the source from the current master yesterday.
Do you have any advice how to fix this issue?
isamu@isamu-desktop:~$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
... logging to /home/isamu/.ros/log/a7d79cc0-fe63-11e7-bccf-bc5ff4f9cb8e/roslaunch-isamu-desktop-3246.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.0.22:38322/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.12
* /turtlebot3_core/baud: 115200
* /turtlebot3_core/port: /dev/ttyACM0
* /turtlebot3_lds/frame_id: base_scan
* /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://192.168.0.21:11311
process[turtlebot3_core-1]: started with pid [3255]
process[turtlebot3_lds-2]: started with pid [3256]
process[turtlebot3_diagnostics-3]: started with pid [3257]
[INFO] [1516508967.049772]: ROS Serial Python Node
[INFO] [1516508967.083459]: Connecting to /dev/ttyACM0 at 115200 baud
[ERROR] [1516508969.227216]: Creation of publisher failed: Checksum does not match: d537ed7b8d95065b6c83830430b93911,427f77f85da38bc1aa3f65ffb673c94c
[INFO] [1516508969.240459]: Note: publish buffer size is 1024 bytes
[INFO] [1516508969.241765]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1516508969.252847]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1516508969.274881]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1516508969.293139]: Setup publisher on joint_states [sensor_msgs/JointState]
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
[INFO] [1516508970.359227]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1516508970.377699]: Note: subscribe buffer size is 1024 bytes
[INFO] [1516508970.379390]: Setup subscriber on cmd_vel [geometry_msgs/Twist]
[INFO] [1516508970.382394]: Start Calibration of Gyro
[INFO] [1516508971.754625]: Calibrattion End
[ERROR] [1516508971.763685]: Tried to publish before configured, topic id 125
[ERROR] [1516508971.777498]: Creation of publisher failed: Checksum does not match: d537ed7b8d95065b6c83830430b93911,427f77f85da38bc1aa3f65ffb673c94c
[INFO] [1516508971.782853]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1516508971.788025]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1516508971.793043]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1516508971.798474]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1516508971.803801]: Setup publisher on /tf [tf/tfMessage]
[ERROR] [1516508971.835651]: Tried to publish before configured, topic id 125
[ERROR] [1516508971.842810]: Tried to publish before configured, topic id 125
[ERROR] [1516508971.860354]: Creation of publisher failed: Checksum does not match: d537ed7b8d95065b6c83830430b93911,427f77f85da38bc1aa3f65ffb673c94c
[INFO] [1516508971.864091]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1516508971.867687]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1516508971.871083]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1516508971.874550]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1516508971.878085]: Setup publisher on /tf [tf/tfMessage]
[ERROR] [1516508971.888718]: Creation of publisher failed: Checksum does not match: d537ed7b8d95065b6c83830430b93911,427f77f85da38bc1aa3f65ffb673c94c
`
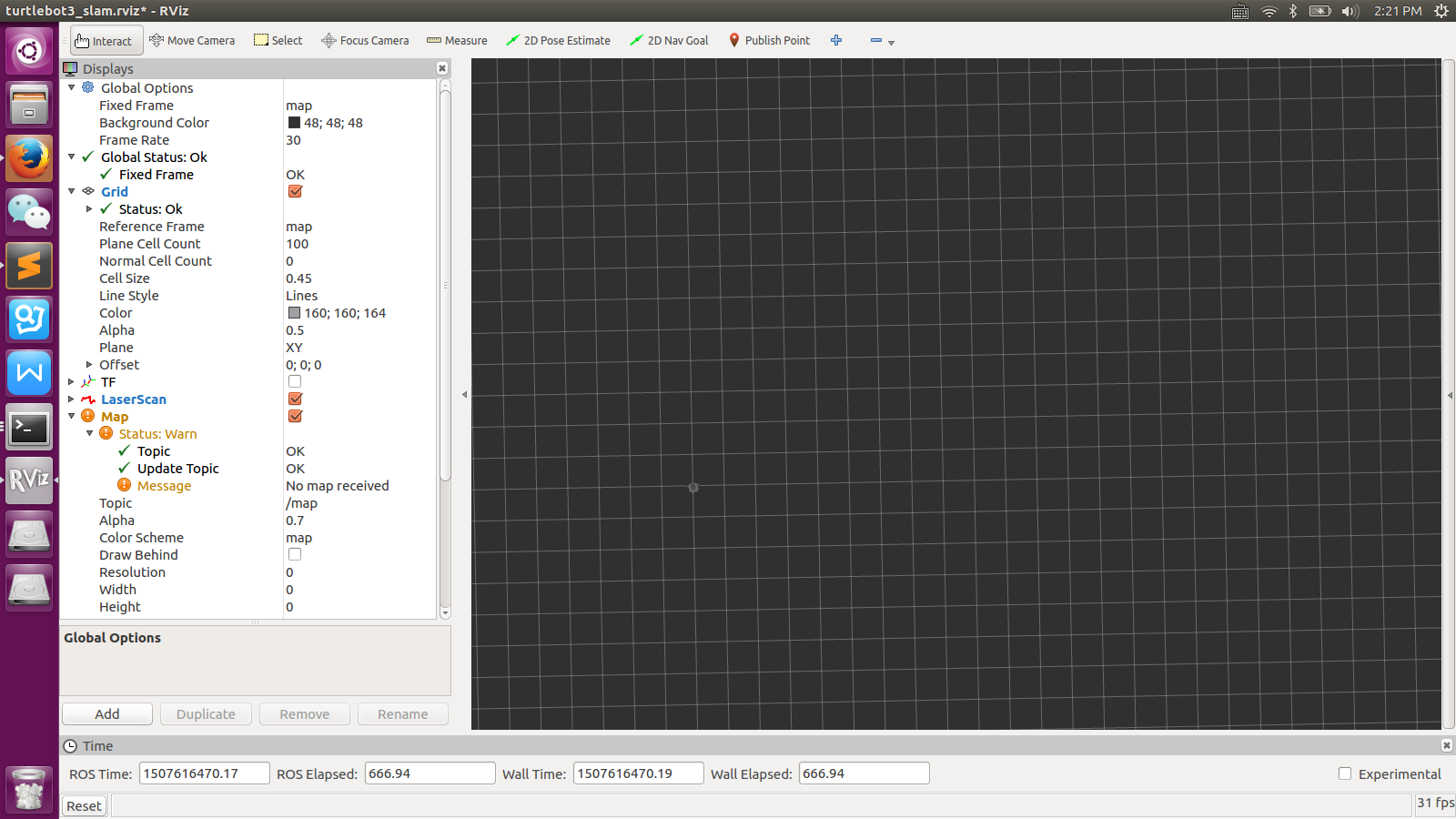
The thing is I have successfully roslaunching on lidar, but I cannot see the point clouds in RVIZ, their is no error message found in terminal, and the RVIZ shows "no map"(picture 1) and there is no position info in the slam terminal (picture 2 column 2).
Yesterday it functioned well actually (picture 3) and I don't know what goes wrong today. Actually, it is not my first time to met this problem, last time it is solved by restart two computer (Remote PC and turtlebot), but this time it doesn't work either. Is there any solution to this problem?


Hi guys ...
i wanted to know that is it possible to run multiple turtlebot3 waffle on one rosmaster?
I tried with using tf_prefix and namespaces and every thing went good... But there is a problem.
the robot position transform message (base_footprint) published by turtlebot3_core does not match the tf_prefix .
in other words i want the turtlebot3_core to publish something like blabla/base_footprint instead of base_footprint
Thank you all ,prior to your assistance guys
In normal situation, after I do
roslaunch turtlebot3_bringup turtlebot3_robot.launch
it shows a lot of [INFO] after [INFO] connecting to /dev/ttyACM0 at 115200 baud, including subscriber and publisher build and sensor calibration.
But now, it stucks in [INFO] connecting to /dev/ttyACM0 at 115200 baud and noes not show anything else. (it is not always like this but very often) On remotePC, the ros_graph shows turtlebot3_core node is disconnected to others.
what should i do to solve it?
Hi,
I would like to know why the gazebo_ros_turtlebot3.cpp, used to make the turtlebot3 autonomously navigates in the gazebo 3D, does not work with the real robot? I am using a turtlebot3 waffle. What changes do I have to make in the cpp code, or in the launch file, in order to make it works with the real robot?
What I mean is, if I run "roslaunch turtlebot3_gazebo turtlebot3_world.launch" and after that I run "roslaunch turtlebot3_gazebo turtlebot3_simulation.launch" the turtlebot3 navigates into the simulator. But, if I run "roscore" in the pc, and, after that, I run "roslaunch turtlebot3_bringup turtlebot3_robot.launch" in the turtlebot3 waffle, and then run "roslaunch turtlebot3_gazebo turtlebot3_simulation.launch" the turtlebot3 does not navegate, it just spins around itself. But, if i run "roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch", I can teleoperate the robot normaly using the keyboard.
Thanks.
Hi robotis,
I encountered a problem when installing the ubuntu onto the intel joule
570x which is the core of turtlebot3 waffle:
The HDMI can not output video signal to our monitors(samsung LS24E390HK/XK).
The monitor cant detect the board as well.
Changing three different HDMI cables, testing the board with
other monitors do not help.
Besides, the serial USB port output normally after upgrade the BIOS.
So, I'd like to know the specific monitor models that u completed the installation of unbuntu?
Thanks.
Hi, I have followed all the instructions as per the eManual and also configured the USB permissions.
aisra@project-aisra:~/catkin_ws$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
... logging to /home/aisra/.ros/log/30a683b6-dcd8-11e7-a9a7-9439e5b85887/roslaunch-project-aisra-15135.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.1.102:36446/
PARAMETERS
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://192.168.1.102:11311
core service [/rosout] found
process[turtlebot3_core-1]: started with pid [15153]
ERROR: cannot launch node of type [hls_lfcd_lds_driver/hlds_laser_publisher]: hls_lfcd_lds_driver
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/aisra/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
[INFO] [1512821083.611483]: ROS Serial Python Node
[INFO] [1512821083.620535]: Connecting to /dev/ttyACM0 at 115200 baud
[ERROR] [1512821083.624758]: Error opening serial: [Errno 2] could not open port /dev/ttyACM0: [Errno 2] No such file or directory: '/dev/ttyACM0'
[turtlebot3_core-1] process has finished cleanly
log file: /home/aisra/.ros/log/30a683b6-dcd8-11e7-a9a7-9439e5b85887/turtlebot3_core-1*.log
all processes on machine have died, roslaunch will exit
shutting down processing monitor...
... shutting down processing monitor complete
done
How do i fix this issue.

turtlebot3@turtlebot3:~$ rostopic echo /camera/depth/points --> does not give any data
turtlebot3@turtlebot3:~$ rostopic echo /camera/depth/image_raw --> works fine.
I brought up the realsense sensor using the following bringup command:
turtlebot3@turtlebot3:~$ roslaunch turtlebot3_bringup turtlebot3_realsense.launch
... logging to /home/turtlebot3/.ros/log/50d0066c-1356-11e8-861b-a0c589238c19/roslaunch-turtlebot3-2868.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://172.31.28.61:41062/
SUMMARY
========
PARAMETERS
* /camera/driver/base_frame_id: camera_link
* /camera/driver/camera_type: R200
* /camera/driver/color_fps: 30
* /camera/driver/color_frame_id: camera_rgb_frame
* /camera/driver/color_optical_frame_id: camera_rgb_optica...
* /camera/driver/depth_frame_id: camera_depth_frame
* /camera/driver/depth_optical_frame_id: camera_depth_opti...
* /camera/driver/fisheye_frame_id: camera_fisheye_frame
* /camera/driver/fisheye_optical_frame_id: camera_fisheye_op...
* /camera/driver/imu_frame_id: camera_imu_frame
* /camera/driver/imu_optical_frame_id: camera_imu_optica...
* /camera/driver/ir2_frame_id: camera_ir2_frame
* /camera/driver/ir2_optical_frame_id: camera_ir2_optica...
* /camera/driver/ir_frame_id: camera_ir_frame
* /camera/driver/ir_optical_frame_id: camera_ir_optical...
* /camera/driver/mode: manual
* /camera/driver/serial_no:
* /camera/driver/usb_port_id:
* /rosdistro: kinetic
* /rosversion: 1.12.12
NODES
/camera/
driver (nodelet/nodelet)
nodelet_manager (nodelet/nodelet)
ROS_MASTER_URI=http://172.31.28.61:11311
process[camera/nodelet_manager-1]: started with pid [2885]
process[camera/driver-2]: started with pid [2886]
[ INFO] [1518812254.190159108]: Initializing nodelet with 4 worker threads.
Intel RealSense F200_camera ; 2.60.0.0
Intel RealSense LR200_camera ; 2.0.71.18
Intel RealSense R200_camera ; 1.0.72.06
Intel RealSense SR300_camera ; 3.10.10.0
Intel RealSense ZR300_adapter ; 1.29.0.0
Intel RealSense ZR300_camera ; 2.0.71.28
Intel RealSense ZR300_motion_module ; 1.25.0.0
[ INFO] [1518812254.811450832]: /camera/driver - Detected the following camera:
- Serial No: 2471011859, USB Port ID: 2-2-4, Name: Intel RealSense R200, Camera FW: 1.0.72.06
[ INFO] [1518812254.811520164]: /camera/driver - Connecting to camera with Serial No: 2471011859, USB Port ID: 2-2-4
[ INFO] [1518812255.421812555]: /camera/driver - Setting static camera options
[ INFO] [1518812255.451077191]: /camera/driver - Enabling Depth in manual mode
[ INFO] [1518812255.586311178]: /camera/driver - Enabling Color in manual mode
[ INFO] [1518812255.587009954]: /camera/driver - Starting camera
[ INFO] [1518812255.617121353]: /camera/driver - Publishing camera transforms (/tf_static)
[ INFO] [1518812255.617605488]: /camera/driver - Setting dynamic camera options (r200_dc_preset=5)
[ INFO] [1518812256.376554156]: /camera/driver - Initializing Depth Control Preset to 5
[ INFO] [1518812259.940438546]: /camera/driver - Setting dynamic camera options
The tf tree of r200 in turtlebot3 model file does not match with the one broadcasted by r200 nodelet.
I'll fix it.
TurtleBot3
turtlebot3_framde.pdf
R200
r200_frames.pdf
Hi, when I running roslaunch turtlebot3_bringup turtlebot3_lidar.launch on Turtlebot3. It shows like that:
PARAMETERS
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
ROS_MASTER_URI=http://192.168.1.114:11311
core service [/rosout] found
process[turtlebot3_core-1]: started with pid [2100]
ERROR: cannot launch node of type [hls_lfcd_lds_driver/hlds_laser_publisher]: hls_lfcd_lds_driver
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/turtlebot3/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
[INFO] [1510071637.611895]: ROS Serial Python Node
[INFO] [1510071637.682395]: Connecting to /dev/ttyACM0 at 115200 baud
[INFO] [1510071639.970637]: Note: publish buffer size is 1024 bytes
[INFO] [1510071639.972320]: Setup publisher on sensor_state [turtlebot3_msgs/SensorState]
[INFO] [1510071639.991698]: Setup publisher on imu [sensor_msgs/Imu]
[INFO] [1510071640.010225]: Setup publisher on cmd_vel_rc100 [geometry_msgs/Twist]
[INFO] [1510071640.085019]: Setup publisher on odom [nav_msgs/Odometry]
[INFO] [1510071640.108005]: Setup publisher on joint_states [sensor_msgs/JointState]
[INFO] [1510071645.058791]: Setup publisher on /tf [tf/tfMessage]
[INFO] [1510071645.091485]: Note: subscribe buffer size is 1024 bytes
How can I fix it. Thanks
Hi
I saw turtlebot3 & Google Cartographer ROS on the site( http://turtlebot3.robotis.com/en/latest/slam.html)
I want to manipulate directly to make a SLAM map.
For example, I want to link cartographer instead of Gmapping on this site.(http://turtlebot3.robotis.com/en/latest/slam.html)... turtlebot3_teleop_key + Cartographer
It is not good when applied.
The topic is not activated in turtlebot3_teleop_key node because Cartographer ROS is applied.
I refer to this site and install and apply it. ( https://google-cartographer-ros-for-turtlebots.readthedocs.io/en/latest/ )
The demo of this site was successful.
Please, Can you teach me how to apply it?
Hi
Due to uncorrect working of my TB3, I decided to remake from scratch the installation .
thus after having installed ubuntu, installed ROS without problem
now I have a huge concern when it is time to Install Dependent Packages
the RPI freezes when I make the command cd ~/catkin_ws && catkin_make
it stopsall the time at 94% like the picture is showing
if somebody has an idea of what's going wrong ?


I have some questions below relating to TB3 burger as follows:
Thanks.
HI,
First of all happy new year to all of you, Hope this new year will bring you everything you are dreaming of
I'm a rookie , I just finalized the mounting of the Turtlebot3, looks amazing , and made my first teleoperation with success.
But My concern is the lidar and Rviz, when I approach object in direction to the turtlebot, on Rviz, the visualization is not matching with the reality ( wrong positioning of the points vs where they are in real )
Would it be possible to help me on this issue
Kind regards
Hi engineer,
The max speed for Burger is 0.22m/s, and for Waffle is 0.26m/s. Is it possible to increase speed to 0.8m/s - 1.0m/s? for example:
Figured it out here:
Dear Robotis Representative,
My team recently purchased a turtlebot3 from robotis and the package came with a intel joule 570x board and OpenCR 1.0 board. We were trying to control one DYNAMIXEL XM430-W210-R by using the intel joule 570x board and the OpenCR 1.0 board. The program that we used was the simplest Dynamixel tutorial from the following website (http://wiki.ros.org/dynamixel_workbench_single_manager/Tutorials/CommandLine). By following the instruction, we were able to complete step 1, step 2 and step 3 without any issues. However, when we were executing a command line from step 4 (roslaunch my_dynamixel_workbench_tutorial single_manager.launch) , we received the following error: Please Check USB Port authorization and Baudrate [ex: 57600,115200, 1000000, 3000000] ...Failed to find dynamixel!. We have double checked the baudrate and model ID and they seemed to be correct. We can't figure out why it is failing to find dynamixel. To make things clearer, we are attaching an image the entire process. Thank you for your help and time in advance!
SIncerely,
Hong

Hi,
I tried to bring up the turtlebot3 with command below:
"roslaunch turtlebot3_bringup turtlebot3_robot.launch"
However, it seems it doesn't work properly. Errors show up:
[INFO] [1516852585.597507]: Setup publisher on /tf [tf/tfMessage]
[ERROR] [1516852026.681106]: Tried to publish before configured, topic id 125
[ERROR] [1516852026.685209]: Creation of publisher failed: Checksum does not match: d537ed7b8d95065b6c83830430b93911,427f77f85da38bc1aa3f65ffb673c94c
I tried to catkin_make the turtlebot3 packages few times but nothing improve.
I still manage to control the robot via teleop. However, when I run rviz, nothing is shown in the rviz including the robot model. Error I got in the rviz:
Could anyone help me to solve the problem?
In the turtlbot3_slam package, there's a really large bag file (68 MB) that makes it into the debian packages. It would be really great if that could be avoided, and replaced with a catkin_download instead.
Up until the part of running slam / amcl it works fine, but as soon as a new tf map -> odom gets published the Turtlebot3 drives forward instead of backwards and backwards instead of forwards. Any idea how to solve this issue? (IMU and motors are mounted correctly.)
Do you plan to support ROS2?
hello guys, I want to simulate the bag data that I got from ROS in MATLAB. I separated the pose and range data from the bag file. and I wrote a script to plot the laser data and build a map (I assumed that my poses are correct). when I run my code, It works well, till the robot turns!. at that point, the scan data turns in the opposite direction! till the robot gets straight again. and again when the robot turns again I experience the same problem till the robot gets straight. I don't know whats wrong!!...the transformation I used works well except when the robot turn!!
(p.s : green points are scan data)

turtlebot3@turtlebot3:~$ roslaunch turtlebot3_bringup turtlebot3_robot.launch
... logging to /home/turtlebot3/.ros/log/50d0066c-1356-11e8-861b-a0c589238c19/roslaunch-turtlebot3-2515.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://172.31.28.61:44909/
SUMMARY
========
PARAMETERS
* /rosdistro: kinetic
* /rosversion: 1.12.12
* /turtlebot3_core/baud: 115200
* /turtlebot3_core/port: /dev/ttyACM0
* /turtlebot3_lds/frame_id: base_scan
* /turtlebot3_lds/port: /dev/ttyUSB0
NODES
/
turtlebot3_core (rosserial_python/serial_node.py)
turtlebot3_diagnostics (turtlebot3_bringup/turtlebot3_diagnostics)
turtlebot3_lds (hls_lfcd_lds_driver/hlds_laser_publisher)
auto-starting new master
process[master]: started with pid [2533]
ROS_MASTER_URI=http://172.31.28.61:11311
setting /run_id to 50d0066c-1356-11e8-861b-a0c589238c19
process[rosout-1]: started with pid [2546]
started core service [/rosout]
process[turtlebot3_core-2]: started with pid [2549]
process[turtlebot3_lds-3]: started with pid [2550]
process[turtlebot3_diagnostics-4]: started with pid [2551]
[INFO] [1518812209.978335]: ROS Serial Python Node
[INFO] [1518812209.993142]: Connecting to /dev/ttyACM0 at 115200 baud
[ERROR] [1518812227.101711]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812242.104960]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812257.107953]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812272.109768]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812287.111436]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812302.114523]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812317.117827]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812332.119702]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812347.121911]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812362.124240]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812377.127180]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812392.129857]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812407.131875]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812422.133763]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812437.136049]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812452.138707]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812467.141226]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812482.143648]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812497.145154]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812512.147175]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812527.149109]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812542.152116]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812557.155076]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812572.157114]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
[ERROR] [1518812587.160317]: Unable to sync with device; possible link problem or link software version mismatch such as hydro rosserial_python with groovy Arduino
I made sure the rosserial package is updated:
turtlebot3@turtlebot3:~$ sudo apt-get install ros-kinetic-rosserial-python
[sudo] password for turtlebot3:
Reading package lists... Done
Building dependency tree
Reading state information... Done
ros-kinetic-rosserial-python is already the newest version (0.7.7-0xenial-20171129-143249-0800).
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb cifs-utils dmeventd dmraid dpkg-repack gir1.2-clutter-1.0 gir1.2-clutter-gst-3.0 gir1.2-cogl-1.0 gir1.2-coglpango-1.0 gir1.2-gtkclutter-1.0 gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 kde-config-screenlocker
kinit kio kpackagelauncherqml kpackagetool5 kpartx kpartx-boot kwayland-data kwayland-integration kwin kwin-common kwin-data kwin-x11 libbonobo2-0 libbonobo2-common libdebian-installer4 libdevmapper-event1.02.1
libdmraid1.0.0.rc16 libfam0 libgnome-2-0 libgnome2-common libgnomevfs2-0 libgnomevfs2-common libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5archive5 libkf5attica5 libkf5auth-data libkf5auth5
libkf5bookmarks-data libkf5bookmarks5 libkf5calendarevents5 libkf5codecs-data libkf5codecs5 libkf5completion-data libkf5completion5 libkf5config-bin libkf5config-data libkf5configcore5 libkf5configgui5 libkf5configwidgets-data
libkf5configwidgets5 libkf5coreaddons-data libkf5coreaddons5 libkf5crash5 libkf5dbusaddons-bin libkf5dbusaddons-data libkf5dbusaddons5 libkf5declarative-data libkf5declarative5 libkf5globalaccel-bin libkf5globalaccel-data
libkf5globalaccel5 libkf5globalaccelprivate5 libkf5gpgmepp5 libkf5guiaddons5 libkf5i18n-data libkf5i18n5 libkf5iconthemes-bin libkf5iconthemes-data libkf5iconthemes5 libkf5idletime5 libkf5itemviews-data libkf5itemviews5
libkf5jobwidgets-data libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kdelibs4support-data libkf5kdelibs4support5 libkf5kdelibs4support5-bin libkf5kiocore5 libkf5kiofilewidgets5 libkf5kiontlm5 libkf5kiowidgets5
libkf5newstuff-data libkf5newstuff5 libkf5notifications-data libkf5notifications5 libkf5package-data libkf5package5 libkf5parts-data libkf5parts-plugins libkf5parts5 libkf5plasma5 libkf5plasmaquick5 libkf5quickaddons5
libkf5service-bin libkf5service-data libkf5service5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5 libkf5wallet-bin libkf5wallet-data libkf5wallet5
libkf5waylandclient5 libkf5waylandserver5 libkf5widgetsaddons-data libkf5widgetsaddons5 libkf5windowsystem-data libkf5windowsystem5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwalletbackend5-5
libkwin4-effect-builtins1 libkwineffects7 libkwinglutils7 libkwinxrenderutils7 liblvm2app2.2 liblvm2cmd2.02 liborbit-2-0 libparted-fs-resize0 libphonon4qt5-4 libpolkit-qt5-1-1 libqt5multimedia5-plugins libreadline5 libvoikko1
libxcb-composite0 libxcb-cursor0 libxcb-damage0 linux-headers-4.4.0-97 linux-headers-4.4.0-97-generic localechooser-data lvm2 plasma-framework python3-icu python3-pam python3-pyqt4 qml-module-org-kde-kquickcontrols
qml-module-org-kde-kquickcontrolsaddons qml-module-qtmultimedia qml-module-qtquick-controls qml-module-qtquick-dialogs qml-module-qtquick-privatewidgets rdate ros-kinetic-control-toolbox ros-kinetic-diff-drive-controller
ros-kinetic-forward-command-controller ros-kinetic-gazebo-ros-control ros-kinetic-joint-limits-interface ros-kinetic-joint-state-controller ros-kinetic-position-controllers ros-kinetic-transmission-interface snap-confine
sonnet-plugins thermald user-setup
Use 'sudo apt autoremove' to remove them.
0 upgraded, 0 newly installed, 0 to remove and 95 not upgraded.
turtlebot3@turtlebot3:~$ sudo apt-get install ros-kinetic-rosserial-arduino
Reading package lists... Done
Building dependency tree
Reading state information... Done
ros-kinetic-rosserial-arduino is already the newest version (0.7.7-0xenial-20180125-163152-0800).
The following packages were automatically installed and are no longer required:
apt-clone archdetect-deb cifs-utils dmeventd dmraid dpkg-repack gir1.2-clutter-1.0 gir1.2-clutter-gst-3.0 gir1.2-cogl-1.0 gir1.2-coglpango-1.0 gir1.2-gtkclutter-1.0 gir1.2-timezonemap-1.0 gir1.2-xkl-1.0 kde-config-screenlocker
kinit kio kpackagelauncherqml kpackagetool5 kpartx kpartx-boot kwayland-data kwayland-integration kwin kwin-common kwin-data kwin-x11 libbonobo2-0 libbonobo2-common libdebian-installer4 libdevmapper-event1.02.1
libdmraid1.0.0.rc16 libfam0 libgnome-2-0 libgnome2-common libgnomevfs2-0 libgnomevfs2-common libkdecorations2-5v5 libkdecorations2private5v5 libkf5activities5 libkf5archive5 libkf5attica5 libkf5auth-data libkf5auth5
libkf5bookmarks-data libkf5bookmarks5 libkf5calendarevents5 libkf5codecs-data libkf5codecs5 libkf5completion-data libkf5completion5 libkf5config-bin libkf5config-data libkf5configcore5 libkf5configgui5 libkf5configwidgets-data
libkf5configwidgets5 libkf5coreaddons-data libkf5coreaddons5 libkf5crash5 libkf5dbusaddons-bin libkf5dbusaddons-data libkf5dbusaddons5 libkf5declarative-data libkf5declarative5 libkf5globalaccel-bin libkf5globalaccel-data
libkf5globalaccel5 libkf5globalaccelprivate5 libkf5gpgmepp5 libkf5guiaddons5 libkf5i18n-data libkf5i18n5 libkf5iconthemes-bin libkf5iconthemes-data libkf5iconthemes5 libkf5idletime5 libkf5itemviews-data libkf5itemviews5
libkf5jobwidgets-data libkf5jobwidgets5 libkf5kcmutils-data libkf5kcmutils5 libkf5kdelibs4support-data libkf5kdelibs4support5 libkf5kdelibs4support5-bin libkf5kiocore5 libkf5kiofilewidgets5 libkf5kiontlm5 libkf5kiowidgets5
libkf5newstuff-data libkf5newstuff5 libkf5notifications-data libkf5notifications5 libkf5package-data libkf5package5 libkf5parts-data libkf5parts-plugins libkf5parts5 libkf5plasma5 libkf5plasmaquick5 libkf5quickaddons5
libkf5service-bin libkf5service-data libkf5service5 libkf5solid5 libkf5solid5-data libkf5sonnet5-data libkf5sonnetcore5 libkf5sonnetui5 libkf5textwidgets-data libkf5textwidgets5 libkf5wallet-bin libkf5wallet-data libkf5wallet5
libkf5waylandclient5 libkf5waylandserver5 libkf5widgetsaddons-data libkf5widgetsaddons5 libkf5windowsystem-data libkf5windowsystem5 libkf5xmlgui-bin libkf5xmlgui-data libkf5xmlgui5 libkscreenlocker5 libkwalletbackend5-5
libkwin4-effect-builtins1 libkwineffects7 libkwinglutils7 libkwinxrenderutils7 liblvm2app2.2 liblvm2cmd2.02 liborbit-2-0 libparted-fs-resize0 libphonon4qt5-4 libpolkit-qt5-1-1 libqt5multimedia5-plugins libreadline5 libvoikko1
libxcb-composite0 libxcb-cursor0 libxcb-damage0 linux-headers-4.4.0-97 linux-headers-4.4.0-97-generic localechooser-data lvm2 plasma-framework python3-icu python3-pam python3-pyqt4 qml-module-org-kde-kquickcontrols
qml-module-org-kde-kquickcontrolsaddons qml-module-qtmultimedia qml-module-qtquick-controls qml-module-qtquick-dialogs qml-module-qtquick-privatewidgets rdate ros-kinetic-control-toolbox ros-kinetic-diff-drive-controller
ros-kinetic-forward-command-controller ros-kinetic-gazebo-ros-control ros-kinetic-joint-limits-interface ros-kinetic-joint-state-controller ros-kinetic-position-controllers ros-kinetic-transmission-interface snap-confine
sonnet-plugins thermald user-setup
Use 'sudo apt autoremove' to remove them.
0 upgraded, 0 newly installed, 0 to remove and 95 not upgraded.
Hi, I just got my turtlebot 3 , and confuse by the wifi connect with remote PC.
Pls help.
Thanks,
kaiqiao
Hello,
My next question is about
My turtlebot 3 burger using Ubuntu Mate 16.04
My remote PC using Ubuntu Xenial 16.04
My ROS using Kinetic Kame
Can you send me some links or file with extension .img that contain ubuntu xenial 16.04 and ROS kinetic kame for my turtlebot3 ?
Because if i do the same like tutorial from turtlebot3 official website (http://turtlebot3.readthedocs.io/en/latest/slam.html) my turtlebot 3 burger cannot use SLAM and NAVIGATION feature from it with error message below. I think there is some update from ROS Kinetic Kame or Ubuntu xenial 16.04 or Ubuntu Mate 16.04 one of them that caused the problem. Can you give me some default package for my turtlebot 3 Burger?
Or can you guide me directly to resolve this problem?
Thank you...

After I roslauch turtlebot3_slam turtlebot3_slam.launch, I can see a good performance.But the map was created worse and worse as time went,especially after I turn right or turn left.Is it because my Kinetic does not locate on the center ?or I need to set the parameter of Kinetic?or just because my turtlebot went too slowly?
Thanks a lot
Hi
I have implemented all instructions right as you've said in tutorials, and every thing was ok until I ran the navigation's example, which it loads the map but does not view the costmap2D and gives an warning like this:
[ WARN] [1503985578.700748532]: Costmap2DROS transform timeout. Current time: 1503985578.7007, global_pose stamp: 1503985533.6728, tolerance: 0.2000
I've changed the tolerance timeout but it did nothing on this issue.
as I have this problem the robot does not move whenever I set a 2D Goal. (thats logical because the costmap2D does not exist !!!)
I would really appreciate if anyone could help me to solve this problem.
Thanks
(I have a burger, Turtlebot 3)
Also tried launch SLAM file, RVIZ shows "no map received"
Today i test r200 camera . i startup r200_nodelet_default, several test the ubuntu system always very slow.
But i plug r200 into computer, it will be all ok .
I only plug r200 into joule usb , it can work ,but also slow .
It can't work again when i use usb-hub and plug in laser .
I was able to control TurtleBot 3 robot using my keyboard commands (teleoperation) first. Then, I decided to try follower application demo and followed the instructions about installing packages. Then, unfortunately, follower demo did not work. What is worse is that when I tried to go back to teleoperation, unfortunately, I could not control the robot this time using keyboard commands.
Could you please give me your guidance on this issue?
Thanks,
Mark
After I create a map, I want to test the navigation part. But there is a obstacle that the orientation is opposite. Then when I set up the goal position, whole process is wrong.
Hi
I have followed the tutorial from the robotis emanual by usng this command :
rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200
but this is what I'm getting :
~$ rosrun rosserial_python serial_node.py __name:=turtlebot3_core _port:=/dev/ttyACM0 _baud:=115200
Traceback (most recent call last):
File "/opt/ros/kinetic/lib/rosserial_python/serial_node.py", line 48, in
rospy.init_node("serial_node")
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/client.py", line 326, in init_node
_init_node_params(argv, name)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/client.py", line 186, in _init_node_params
set_param(rosgraph.names.PRIV_NAME + param_name, param_value)
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/client.py", line 514, in set_param
_param_server[param_name] = param_value #MasterProxy does all the magic for us
File "/opt/ros/kinetic/lib/python2.7/dist-packages/rospy/msproxy.py", line 148, in setitem
self.target.setParam(rospy.names.get_caller_id(), rospy.names.resolve_name(key), val)
File "/usr/lib/python2.7/xmlrpclib.py", line 1243, in call
return self.__send(self.__name, args)
File "/usr/lib/python2.7/xmlrpclib.py", line 1602, in __request
verbose=self.__verbose
File "/usr/lib/python2.7/xmlrpclib.py", line 1283, in request
return self.single_request(host, handler, request_body, verbose)
File "/usr/lib/python2.7/xmlrpclib.py", line 1311, in single_request
self.send_content(h, request_body)
File "/usr/lib/python2.7/xmlrpclib.py", line 1459, in send_content
connection.endheaders(request_body)
File "/usr/lib/python2.7/httplib.py", line 1053, in endheaders
self._send_output(message_body)
File "/usr/lib/python2.7/httplib.py", line 897, in _send_output
self.send(msg)
File "/usr/lib/python2.7/httplib.py", line 859, in send
self.connect()
File "/usr/lib/python2.7/httplib.py", line 836, in connect
self.timeout, self.source_address)
File "/usr/lib/python2.7/socket.py", line 575, in create_connection
raise err
socket.error: [Errno 111] Connection refused
If someone could help me it would be helpfull
kind regards
patrick
Hi, i'm a university student to research in the laboratory from Korea.
I bought 360 Laser Distance Sensor LDS-01 from ROBOTIS company.
I had question about the laser sensor, and i asked to the company. But they want to tell i ask to you.
So, my question is that 10x10 Matrix is shown from matlab/simulink through the Sensor.
But i want to know a distance and angle from the Sensor. I don't know understand the 10x10 Matrix's mean. Please can you teach me about solution as soon as possibe. Thank you.

Hi
I tried to run the teleop with a XBOX360 joystick, but when I launch
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
it crashes

if somebody has an idea of what is going wrong
:-)
Hi !
Any updates about a potential docking service?
Thanks!
Hello,
i'm using a TB3 burger from an ubuntu 16.04 remote machine
i tried to install you applications package following the procedure you describe at the top of
http://emanual.robotis.com/docs/en/platform/turtlebot3/applications/#turtlebot-follower-demo
catkin_make runs to a point (~97%) and then sends out error messages until it ends with
Invoking "make -j4 -l4" failed
details of the error log attached
any thought on what went wrong?
thanks for your time and patience
François
TB3_applications.pdf
Hello,
I carefully searched for this topic, but the only one I found that wrote about it never answered back.
If I am right, the examples provided for DynamixelSDK are designed for the use with OpenCR1.0 board configured as USB2Dynamixel adapter. However, in my project we need to control further Dynamixels (ID 3, ID 4) while the OpenCR board is in Turtlebot3_core configuration.
Since I am completely new to this topic, I hope you can give me the right direction.
I thought about writing a class like Turtlebot3MotorDriver, include its functionality in the Turtlebot3_core.ino and upload this with ArduinoIDE. If I am right, most functions used in Turtlebot3MotorDriver are based on the DynamixelSDK.h, so I would have to make myself familiar with the dynamixel-sdk, right? But the dynamixel-workbench package would not be relevant for me in this case, right?
This idea seems very difficult to me though, is there an easier way?
Are there any examples in this direction?
Thanks a lot in advance.
I've been trying to analyze deviation in ranges that I read from /scan topic while Turtlebot3 (burger) is stationary, but then I realised I should just look in models and this is what I found in turtlebot3_burger.gazebo.xacro (omitting some detail)
<gazebo> <plugin name="imu_plugin" filename="libgazebo_ros_imu.so"> ... <gaussianNoise>0.0</gaussianNoise> <imu> <noise> <type>gaussian</type> <rate> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </rate> </noise> </imu> </plugin> </gazebo>
and then in another place
<gazebo reference="base_scan"> <sensor type="ray" name="lds_lfcd_sensor"> <ray> <scan>...</scan> <range>... </range> <noise> <type>gaussian</type> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray>
So I'm a bit confused about which Gaussian noise you are modeling (which mean/std) and why these particular values? I want to later on move on from simulation to using the actual TB3 and I would like to use realistic values.
After i updated Turtlebot folder in my Raspberry Pi of TB3 Burger according to https://discourse.ros.org/t/turtlebot3-software-and-firmware-update-and-waffle-pi/3729, then when I try to catkin_make, Pi will just hang/freeze as

Then I remove turtlebot3_patrol folder and catkin_make again, Pi always hangs/freezes at

Pi will just hang/freeze and even the mouse pointer cannot move at all!
What was happened? Any advice?
Following the emanual, I tried to build my turtlebot waffle from the bulk supplies.
However, it did not work. Then, I figured out that I had to run the motor setup program "turtlebot3_setup" from arduino IDE. Then, I noticed that i had to set up the motors by sending some commands from the console in the IDE.
Finally, it worked but spent a lot of time. We need to add the content of how to set up the new motor for replacement to the emanual.
I want to run in indigo , but all document in kinetic . so if i want to use indigo , how to change ? or can provide indigo branch to work.
Hi im working with turtlebot3
I want to make literally 'return system' which means that Turtlebot3 goes to goal position and return to the
initial position.
I already succeed to run turtlebot3_navigation package.
But i dont know how to edit a package to make 'return system'
Do you know what i mean???
Please let me know guys
I just got the turtlebot3 and I am stuck with step 6, SBC software setup because of slowness of the board. It cant even show ubuntu desktop, the cpu usage is close to zero, there is not even a single program running yet the board will get freeze and not respond to keyboard , mouse. Please provide me some help if you can thank you very much
It's currently done manually in the install instructions: http://turtlebot3.robotis.com/en/latest/sbc_software.html#usb-settings-burger-and-waffle
For the TurtleBot2 we have a simple script that makes it a one liner to setup: https://github.com/yujinrobot/kobuki_core/blob/devel/kobuki_ftdi/scripts/create_udev_rules
Wiki instructions for using the script are here: http://wiki.ros.org/turtlebot/Tutorials/indigo/Kobuki%20Base
This will decrease the likelyhood of user error at this stage of the installation instructions.
I have been noticing this for some time now, that the wifi connection to the turtlebot3 drops after sometime
I have gone on and updated based on the following: **https://discourse.ros.org/t/turtlebot3-software-and-firmware-update-and-waffle-pi/3729
but still, the network has issues,
The only solution for me is to reboot turtlebot3 and then reestablish the ssh connection.
Have you guys seen this behavior? Is there a way to diagnose this problem?
Hello. I'm a newbie in robot building, I'm afraid the question may seem stupid.
Can we change the motor in the TurtleBot 3 in order to enhance the maximum velocity in travel? If it is, do we need to configure it in the ROS environment?
Dear Robotis,
Pardon if this issues has been raised before.
I just purchased TB3 Burger. My Pie3 works just fine but I was annoyed how slow Pi3 was so I purchased the RealSense Dev Kit with UP board.
All installations for RealSense works fine however, following all instructions from emanual.robotis.com. I had issues with the Cmake: (bare in mind i am complete newbie, so pardon in adv)
`syawal@syawalUP:~$ cd ~/catkin_ws && catkin_make
Base path: /home/syawal/catkin_ws
Source space: /home/syawal/catkin_ws/src
Build space: /home/syawal/catkin_ws/build
Devel space: /home/syawal/catkin_ws/devel
Install space: /home/syawal/catkin_ws/install
-- Using CATKIN_DEVEL_PREFIX: /home/syawal/catkin_ws/devel
-- Using CMAKE_PREFIX_PATH: /opt/ros/kinetic
-- This workspace overlays: /opt/ros/kinetic
-- Using PYTHON_EXECUTABLE: /usr/bin/python
-- Using Debian Python package layout
-- Using empy: /usr/bin/empy
-- Using CATKIN_ENABLE_TESTING: ON
-- Call enable_testing()
-- Using CATKIN_TEST_RESULTS_DIR: /home/syawal/catkin_ws/build/test_results
-- Found gtest sources under '/usr/src/gtest': gtests will be built
-- Using Python nosetests: /usr/bin/nosetests-2.7
-- catkin 0.7.8
-- BUILD_SHARED_LIBS is on
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- ~~ traversing 11 packages in topological order:
-- ~~ - turtlebot3 (metapackage)
-- ~~ - turtlebot3_msgs
-- ~~ - hls_lfcd_lds_driver
-- ~~ - master_bridge
-- ~~ - cvra_operations
-- ~~ - turtlebot3_bringup
-- ~~ - turtlebot3_interactions
-- ~~ - turtlebot3_lds
-- ~~ - turtlebot3_patrol
-- ~~ - turtlebot3_pointop
-- ~~ - debra_description
-- ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
-- +++ processing catkin metapackage: 'turtlebot3'
-- ==> add_subdirectory(turtlebot3/turtlebot3)
-- +++ processing catkin package: 'turtlebot3_msgs'
-- ==> add_subdirectory(turtlebot3_msgs)
-- Using these message generators: gencpp;geneus;genlisp;gennodejs;genpy
-- turtlebot3_msgs: 4 messages, 2 services
-- +++ processing catkin package: 'hls_lfcd_lds_driver'
-- ==> add_subdirectory(hls_lfcd_lds_driver)
-- Boost version: 1.58.0
-- Found the following Boost libraries:
-- system
-- +++ processing catkin package: 'master_bridge'
-- ==> add_subdirectory(cvra_debra_ros/master_bridge)
-- +++ processing catkin package: 'cvra_operations'
-- ==> add_subdirectory(cvra_debra_ros/cvra_operations)
CMake Warning at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:76 (find_package):
Could not find a package configuration file provided by "sick_tim" with any
of the following names:
sick_timConfig.cmake
sick_tim-config.cmake
Add the installation prefix of "sick_tim" to CMAKE_PREFIX_PATH or set
"sick_tim_DIR" to a directory containing one of the above files. If
"sick_tim" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
cvra_debra_ros/cvra_operations/CMakeLists.txt:4 (find_package)
-- Could not find the required component 'sick_tim'. The following CMake error indicates that you either need to install the package with the same name or change your environment so that it can be found.
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by "sick_tim" with any
of the following names:
sick_timConfig.cmake
sick_tim-config.cmake
Add the installation prefix of "sick_tim" to CMAKE_PREFIX_PATH or set
"sick_tim_DIR" to a directory containing one of the above files. If
"sick_tim" provides a separate development package or SDK, be sure it has
been installed.
Call Stack (most recent call first):
cvra_debra_ros/cvra_operations/CMakeLists.txt:4 (find_package)
-- Configuring incomplete, errors occurred!
See also "/home/syawal/catkin_ws/build/CMakeFiles/CMakeOutput.log".
See also "/home/syawal/catkin_ws/build/CMakeFiles/CMakeError.log".
Makefile:290: recipe for target 'cmake_check_build_system' failed
make: *** [cmake_check_build_system] Error 1
Invoking "make cmake_check_build_system" failed
`
Hi there, I am using turtlebot3 for navigation purpose. Which navigation algorithm is deployed in the demo? Is it possible to view the source code or customize it? If yes, which file should I look at? Thanks very much!
Hi,
we have a turtlebot3 robot. we assembled it. when we tested openCR with motors by pushing SW1 and SW2 push buttons, one of the motors didn't start turning.
what should we do ?
thanks
#question #dynamixel
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.