A C++ library for linear algebra and geometry manipulation for computer graphics.
- Source Code: https://github.com/juj/MathGeoLib
- Released Downloads: https://github.com/juj/MathGeoLib/tags
- License: http://www.apache.org/licenses/LICENSE-2.0.html
- Bug Tracker: https://github.com/juj/MathGeoLib/issues
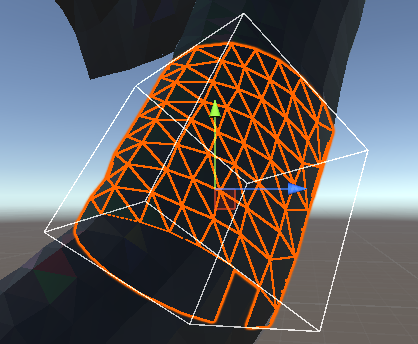
This repository contains an implementation of my 2015 paper "An Exact Algorithm for Finding Minimum Oriented Bounding Boxes". See http://clb.confined.space/minobb/minobb.html for the full text, and http://clb.confined.space/minobb/test/ModelView.html for a live test build.