6月10日,风雨大作。。。(好吧雨早停了) 一时兴起,想着好久没敲过CPP了,最近正好打算复习一下《统计学习方法》,本来想看看PCA来着,一打眼瞅到了SVD。。。SVD是一个比较基础的矩阵分解法,后边的PCA还会用到,所以干脆计划了晚上小小复习一下SVD,然后用久违的CPP实现一下,谁料想本以为挺早就能下班的,一直写到第二天下午。。。。太菜了!!!!但是实现完后还是挺开心的,因此记录一下这一天多的成果。 由于GitHub显示公式不方便,可以到CSDN上看:https://blog.csdn.net/weixin_45804601/article/details/125237191
个人以为SVD好用就是好用在条件弱,效果好,任意的实矩阵都能进行SVD,理论依据如下:
若$A$为一$\text{m} \times{\text{n}}$实矩阵,$A\in R^{\text{m} \times{\text{n}}}$,则$A$的奇异值分解存在,且:
$$
A=U\Sigma V^T
$$
其中:
$$
\Sigma=[\Sigma_1,\Sigma_2] =
\begin{pmatrix}
\sigma_1\
& \sigma_2 \
&& \ddots \
&&& \sigma_r \
&&&& \ddots\
&&&&&\sigma_n\
\end{pmatrix}
$$
其实,通过一些矩阵运算,可以得到: $$ A=U\Sigma V^T=U_1\Sigma_1V_1^T $$ $U_1 \in{R^{\rm m\times r}},$, $\Sigma_1 \in{R^{\rm r\times r}},$,$V_1\in{\rm R^{n\times r}}$. 可以看到,原来矩阵$A\in{\rm R^{m\times n}}$,有$m\cdot n$个元素,而经过紧奇异值分解后,有$m\cdot r+r\cdot r+n\cdot r$,当$r$较小时,数据占用内存大大减少,因此还可以用奇异值分解进行无损压缩矩阵。
透过现象看本质,根据前面奇异值分解的公式,我们可以推导出,每一个矩阵都可以分解成如下形式:
$$
A=\sigma_1\cdot A_1+\sigma_2\cdot A_2+...+\sigma_r\cdot A_r
$$
这里,暂且不管$A_i,i=1,2,...,r$是什么(可以推,太麻烦了不好写),可以很明显的看出$A$可以由$\sigma_i$为权值通过矩阵叠加组成,因此,当某些$\sigma_i$很小时,对组成$A$的贡献很小,可以看成$A$的噪声,将其去除,这样就得到了截断奇异值分解,其矩阵形式如下:
$$
A\approx U_k\Sigma_kV_k^T
$$
为了实现SVD,根据上述公式可以得出,我们需要用到的工具有:
- 盛放矩阵的数据结构;(在此我选用了vector容器)
vector<vector<double>> A = {{1,0,0,0},{0,0,0,4},{0,3,0,0},{0,0,0,0},{2,0,0,0}};- 矩阵乘法运算 ;
// 矩阵乘法
template<typename T>
vector<vector<T>> matrix_multiply(vector<vector<T>> const arrL, vector<vector<T>> const arrR)
{
int rowL = arrL.size();// 左矩阵行数
int colL = arrL[0].size();// 左矩阵列数
int rowR = arrR.size();// 右矩阵行数
int colR = arrR[0].size();// 右矩阵列数
// 判断是否能够相乘
if(colL != rowR)
{
throw "left matrix's row not should equal with right matrix!";
}
// initialize result matrix
vector<vector<T>> res(rowL);
for(int i=0; i<res.size();i++){
res[i].resize(colR);
}
// compute matrix multiplication
for(int i=0; i<rowL; i++){
for(int j=0; j<colR; j++){
for(int k=0; k<colL; k++){
res[i][j] += arrL[i][k]*arrR[k][j];
}
}
}
return res;
}- 矩阵转置;
// 矩阵转置
template<typename T>
vector<vector<T>> transpose(vector<vector<T>> const arr)
{
int row = arr.size();
int col = arr[0].size();
// initialize transpose matrix col*row
vector<vector<T>> trans(col);
for(int i=0;i<col;i++){
trans[i].resize(row);
}
// fill elements
for(int i=0; i<col;i++){
for(int j=0;j<row;j++){
trans[i][j] = arr[j][i];
}
}
return trans;
}- 实对称矩阵特征值特征向量求解(选用Jacobi迭代法)
//提前声明后续用到的argsort函数,功能类似于numpy的那个
template<typename T>
vector<int> argsort(const vector<T>& array);
// 实对称矩阵特征值特征向量
// param: arr :input array
// param: E :eigen vectors
// param: e :eigen values
template<typename T>
void eigen(vector<vector<T>> arr, vector<vector<T>> &E, vector<T> &e)
{
//vector<vector<T>> arr = arr_ori;
int n = arr.size();// size of matrix
int row = 0;// row index of max
int col = 0;// col index of max
int iter_max_num = 10000;//迭代总次数
int iter_num = 0;
double eps = 1e-40;//误差
double max = eps;// 非对角元素最大值
// 初始化特征向量矩阵为单位阵,初始化特征值
E.resize(n);
e.resize(n);
for(int i=0; i<n; i++){
E[i].resize(n,0);
E[i][i] = 1;
}
while(iter_num<iter_max_num && max>=eps)
{
max = fabs(arr[0][1]);
row = 0;
col = 1;
// find max value and index
for(int i=0;i<n;i++){
for(int j=0;j<n;j++){
if(i!=j && fabs(arr[i][j])>max){
max = fabs(arr[i][j]);
row = i;
col = j;
}
}
}
double theta = 0.5*atan2(2 * arr[row][col] , (arr[row][row] - arr[col][col]));
//update arr
double aii = arr[row][row];
double ajj = arr[col][col];
double aij = arr[row][col];
double sin_theta = sin(theta);
double cos_theta = cos(theta);
double sin_2theta = sin(2 * theta);
double cos_2theta = cos(2 * theta);
arr[row][row] = aii*cos_theta*cos_theta + ajj*sin_theta*sin_theta + aij*sin_2theta;//Sii'
arr[col][col] = aii*sin_theta*sin_theta + ajj*cos_theta*cos_theta - aij*sin_2theta;//Sjj'
arr[row][col] = 0.5*(ajj - aii)*sin_2theta + aij*cos_2theta;//Sij'
arr[col][row] = arr[row][col];//Sji'
for (int k = 0; k < n; k++)
{
if (k != row && k != col)
{
double arowk = arr[row][k];
double acolk = arr[col][k];
arr[row][k] = arowk * cos_theta + acolk * sin_theta;
arr[k][row] = arr[row][k];
arr[col][k] = acolk * cos_theta - arowk * sin_theta;
arr[k][col] = arr[col][k];
}
}
// update E
double Eki;
double Ekj;
for(int k=0; k<n; k++){
Eki = E[k][row];
Ekj = E[k][col];
E[k][row] = Eki*cos_theta + Ekj*sin_theta;
E[k][col] = Ekj*cos_theta - Eki*sin_theta;
}
iter_num++;
}
//update e
for(int i=0;i<n;i++){
e[i] = arr[i][i];
}
// sort E by e
vector<int> sort_index;
sort_index = argsort(e);
// initialize E_sorted, e_sorted
vector<vector<T>> E_sorted(n);
for(int i=0;i<n;i++){
E_sorted[i].resize(n);
}
vector<T> e_sorted(n);
for(int i=0;i<n;i++){
e_sorted[i] = e[sort_index[i]];
for(int j=0;j<n;j++){
E_sorted[i][j] = E[i][sort_index[j]];
}
}
E = E_sorted;
e = e_sorted;
//delete &E_sorted, &e_sorted;
cout<<"max element is: "<<max<<", iterate: "<<iter_num<<"times"<<endl;
}在实现完上述工具后,即可实现SVD类,其构造如下:
//*****************************************************//
//########################SVD##########################
//*****************************************************//
//params:
// --arr :input matrix m*n
// --U :left matrix m*r , r <= rank(arr)
// --S :medium matrix r*r
// --V :right matrix n*r
class SVD
{
public:
vector<vector<double>> U,S,V,ATA,A;
int n,m,r;
vector<vector<double>> E; //特征向量矩阵
vector<double> e; // 特征值向量
SVD(vector<vector<double>> arr);
void tight_svd();//紧奇异值分解
void truncated_svd(int);//截断奇异值分解
};
SVD::SVD(vector<vector<double>> arr){
m = arr.size();
n = arr[0].size();
A = arr;
ATA = matrix_multiply(transpose(A),A);
// 计算ATA特征值特征向量
eigen(ATA,E,e);
}
void SVD::tight_svd(){
r = 0;
// 确定秩
for(int i=0;i<e.size();i++){
if(e[i]>1e-10){
r++;
}
else break;
}
//确定V
V = E;
for(int i=0; i<n;i++){
V[i].resize(r);
}
//确定S
S.resize(r);
for(int i=0;i<r;i++){
S[i].resize(r);
S[i][i] = sqrt(e[i]);
}
//确定U
vector<vector<double>> Sinv = S;
for(int i=0;i<r;i++){
Sinv[i][i] = 1/S[i][i];
}
U = matrix_multiply(matrix_multiply(A,V),Sinv);
}
void SVD::truncated_svd(int rr){
r = rr;
//确定V
V = E;
for(int i=0; i<n;i++){
V[i].resize(r);
}
//确定S
S.resize(r);
for(int i=0;i<r;i++){
S[i].resize(r);
S[i][i] = sqrt(e[i]);
}
//确定U
vector<vector<double>> Sinv = S;
for(int i=0;i<r;i++){
Sinv[i][i] = 1/S[i][i];
}
U = matrix_multiply(matrix_multiply(A,V),Sinv);
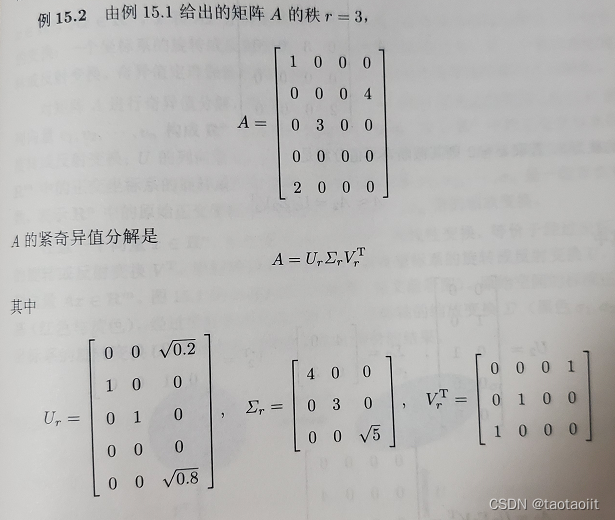
}以《统计机器学习》P277页例15.2为例
代码如下:
int main()
{
vector<vector<double>> A = {{1,0,0,0},{0,0,0,4},{0,3,0,0},{0,0,0,0},{2,0,0,0}};
SVD svd(A);
// tight SVD
svd.tight_svd();
cout<<endl;
cout<<"matrix A:"<<endl;
display_matrix(A);
cout<<endl;
cout<<"matrix U:"<<endl;
display_matrix(svd.U);
cout<<endl;
cout<<"matrix Sigma:"<<endl;
display_matrix(svd.S);
cout<<endl;
cout<<"matrix V':"<<endl;
display_matrix(transpose(svd.V));
//display_matrix(matrix_multiply(matrix_multiply(svd.U,svd.S),transpose(svd.V)));//合成A
}测试结果




