

The codebase is based on gaussian-splatting
The used datasets, MipNeRF360 and Tank & Temple, are hosted by the paper authors here.
For installation:
conda env create --file environment.yml
conda activate lightgaussiannote: we modified the "diff-gaussian-rasterization" in the submodule to get the Global Significant Score.
Lightgaussian includes 3 ways to make the 3D Gaussians be compact
Users can directly prune a trained 3D-GS checkpoint using the following command (default setting):
bash scripts/run_prune_finetune.sh
Users can also train from scratch and jointly prune redundant Gaussians in training using the following command (different setting from the paper):
bash scripts/run_train_densify_prune.sh
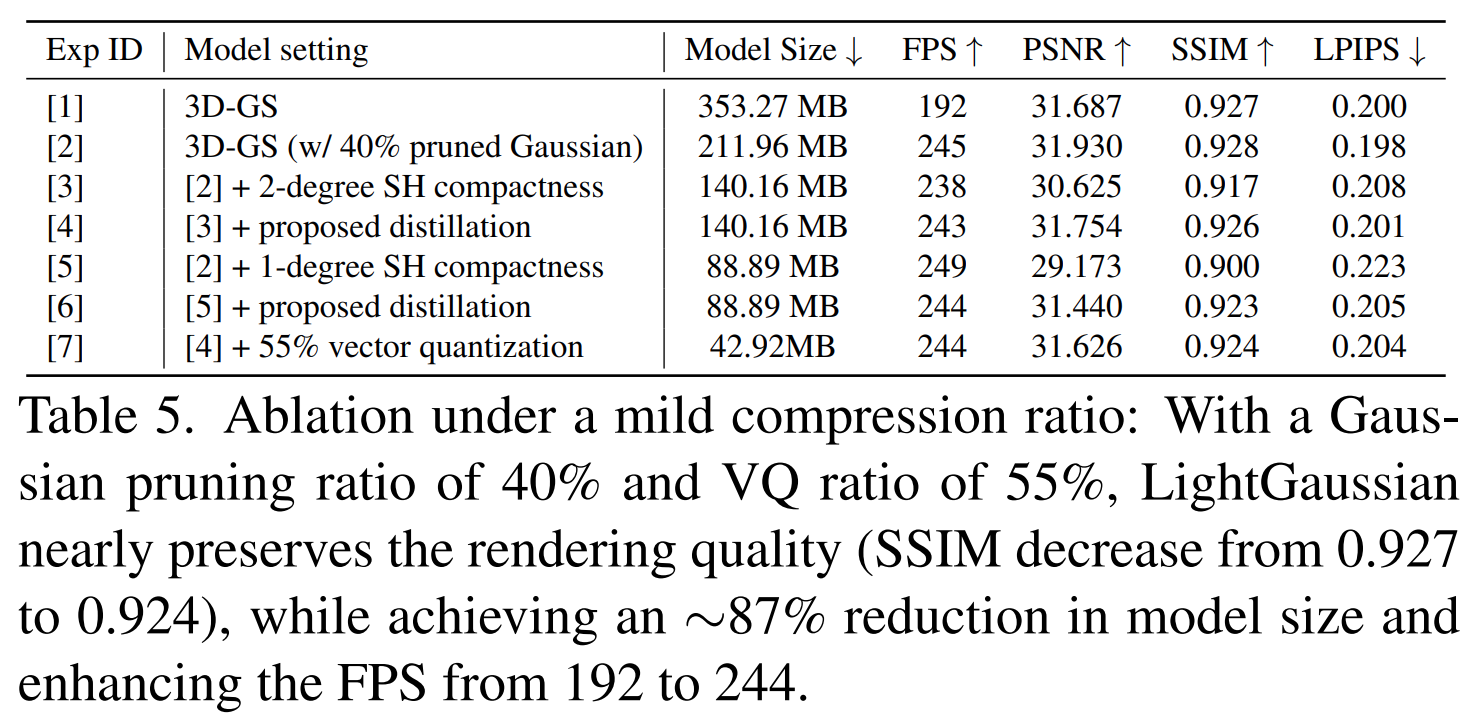
note: 3D-GS is trained for 20,000 iterations and then prune it. The resulting ply file is approximately 35% of the size of the original 3D-GS while ensuring a comparable quality level.
Users can distill 3D-GS checkpoint using the following command (default setting):
bash scripts/run_distill_finetune.sh
Users can quantize a pruned and distilled 3D-GS checkpoint using the following command (default setting):
bash scripts/run_vectree_quantize.sh
Render with trajectory. By default ellipse, you can change it to spiral or others trajectory by changing to corresponding function.
python render_video.py --source_path PATH/TO/DATASET --model_path PATH/TO/MODEL --skip_train --skip_test --video
For render after the Vectree Quantization stage, you could render them through
python render_video.py --load_vq
An example ckpt for room scene can be downloaded here, which mainly includes the following several parts:
- point_cloud.ply —— Pruned, distilled and quantized 3D-GS checkpoint.
- extreme_saving —— Relevant files obtained after vectree quantization.
- imp_score.npz —— Global significance used in vectree quantization.
- Upload module 1: Prune & recovery
- Upload module 2: SH distillation
- Upload module 3: Vectree Quantization
- Upload docker image
We would like to express our gratitude to Yueyu Hu from NYU for the invaluable discussion on our project.
If you find our work useful for your project, please consider citing the following paper.
@misc{fan2023lightgaussian,
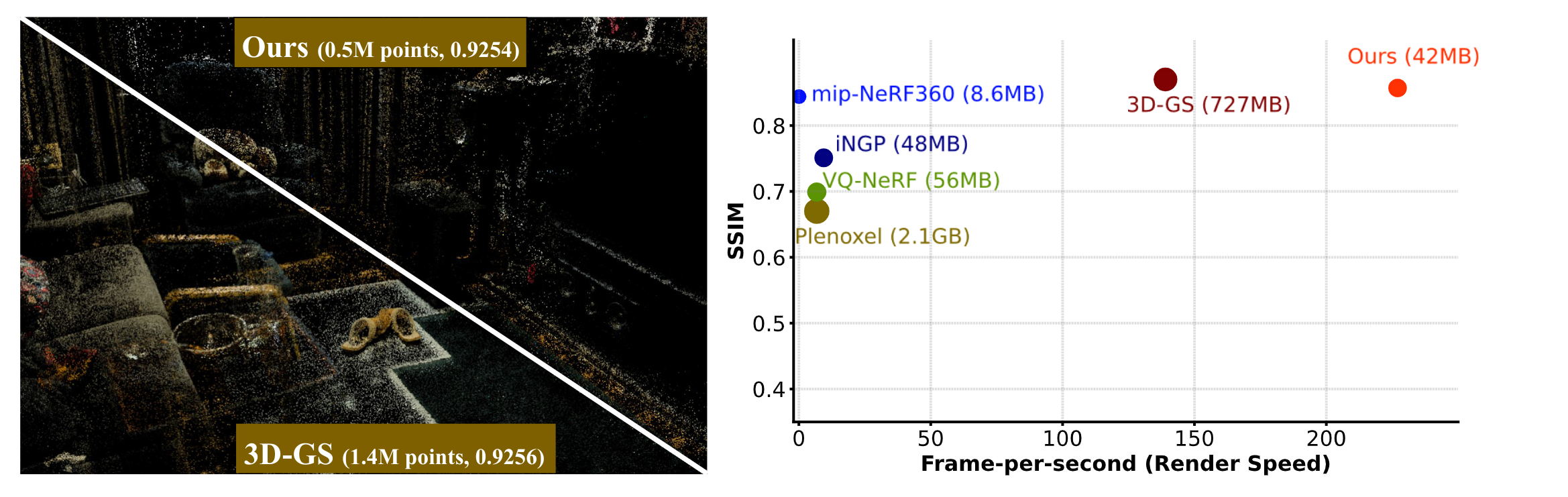
title={LightGaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS},
author={Zhiwen Fan and Kevin Wang and Kairun Wen and Zehao Zhu and Dejia Xu and Zhangyang Wang},
year={2023},
eprint={2311.17245},
archivePrefix={arXiv},
primaryClass={cs.CV} }








































































































































