Dynamic Semantic Mapping using Closed Form Bayesian Inference & Scene Flow
With this code, you can create dynamic semantic occupancy maps with point cloud data acquired from any sensor. We demonstrate our method on the SemanticKITTI dataset and data collected from a Gazebo simulation environment.
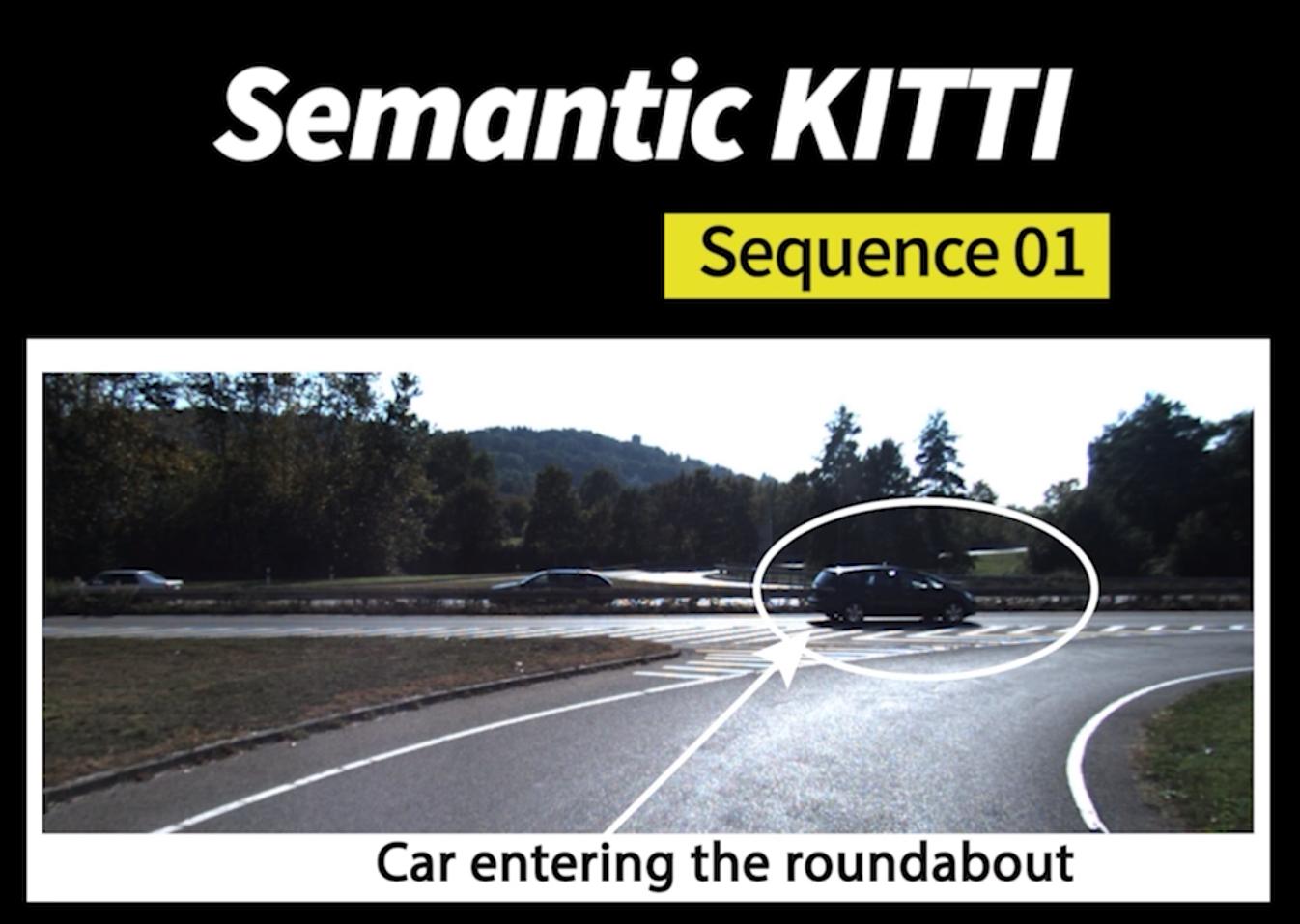
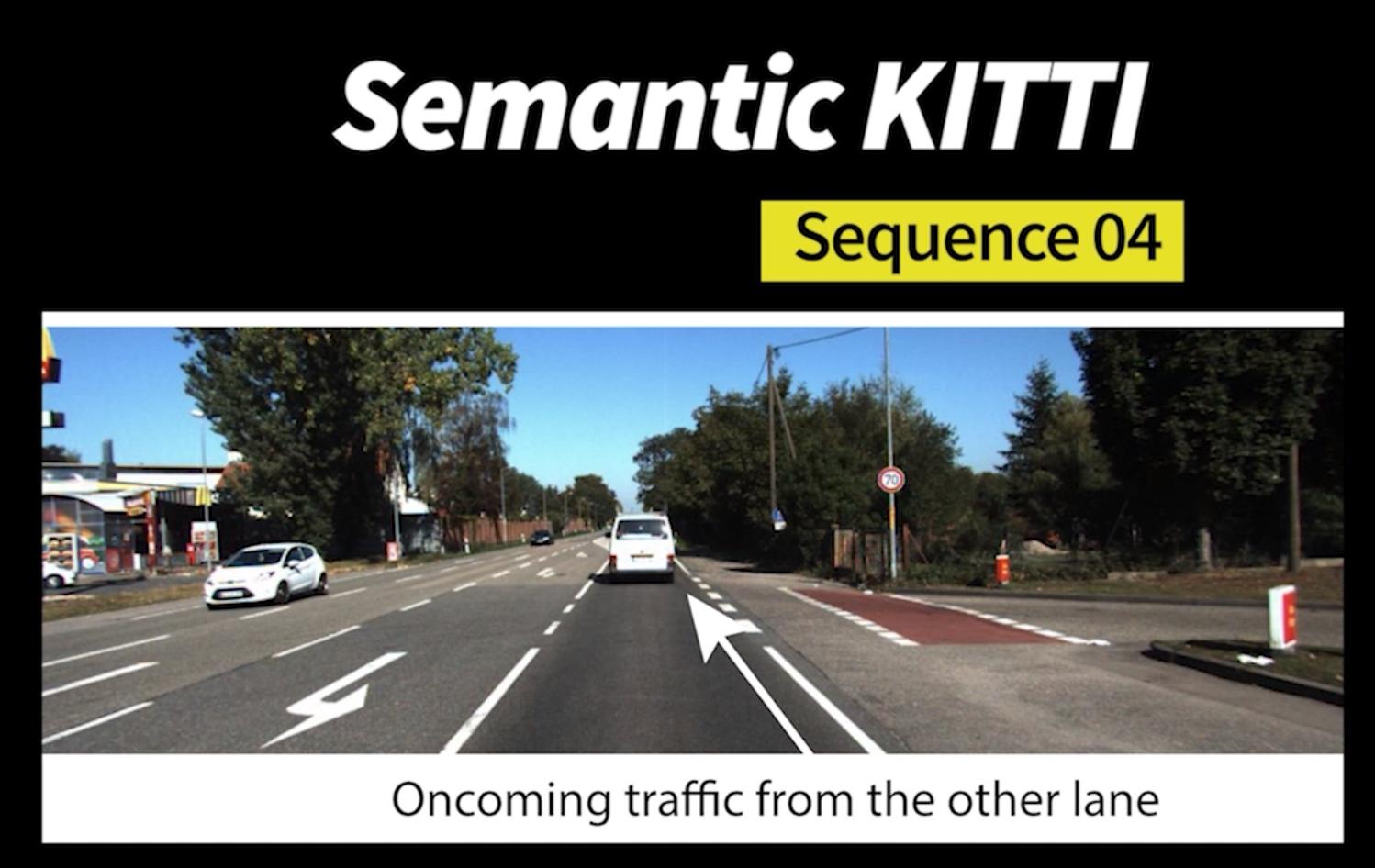
The Sample Scene Image cell displays the car that has to be represented in the map in real-time, while the Static versus Dynamic Mapping cell displays a comparison between static semantic mapping and dynamic semantic mapping.
| Sample Scene Image | Static Versus Dynamic Mapping |
|---|---|
|
|
|
|
|
|
Gazebo Simulator: I store the data collected from a Gazebo simulation environment in the form of a custom point cloud structure with 7 fields: X, Y, Z, VX, VY, VZ & L, where the first three are positional information with respect to the robot frame, the next three fields are the egomotion-compensated scene flow fand the last field is the semantic label. Data is collected with a block laser scanner and filtered with passthrough filters to remove NaNs. Please download data from this link to get pointclouds in ".pcd" format.
SemanticKITTI dataset: The SemanticKITTI dataset can be downloaded from https://semantickitti.org. The data is provided in the correct format and can be downloaded from this link(TODO). Additionally, in the predictions folder, you can also find the corresponding scene flow information for each scan in ".bin" format.
You can drop all this data into the data/ folder.
catkin_ws/src$ git clone https://github.com/katanachan/BKIDynamicSemanticMapping
catkin_ws/src$ cd ..
catkin_ws$ catkin_make
catkin_ws$ source ~/catkin_ws/devel/setup.bashcatkin_ws$ source /opt/intel/compilers_and_libraries/linux/bin/compilervars.sh intel64
catkin_ws$ catkin_make -DCMAKE_C_COMPILER=icc -DCMAKE_CXX_COMPILER=icpc
catkin_ws$ source ~/catkin_ws/devel/setup.bash$ roslaunch semantic_bki multi_tb3_home.launch$ roslaunch semantic_bki semantickitti_node.launchYou will see semantic map in RViz. It also queries each ground truth point for evaluation, stored at data/semantickitti_01/evaluations.
If you are experimenting with other sequences in SemanticKITTI, make sure to open the launch file and modify the following: 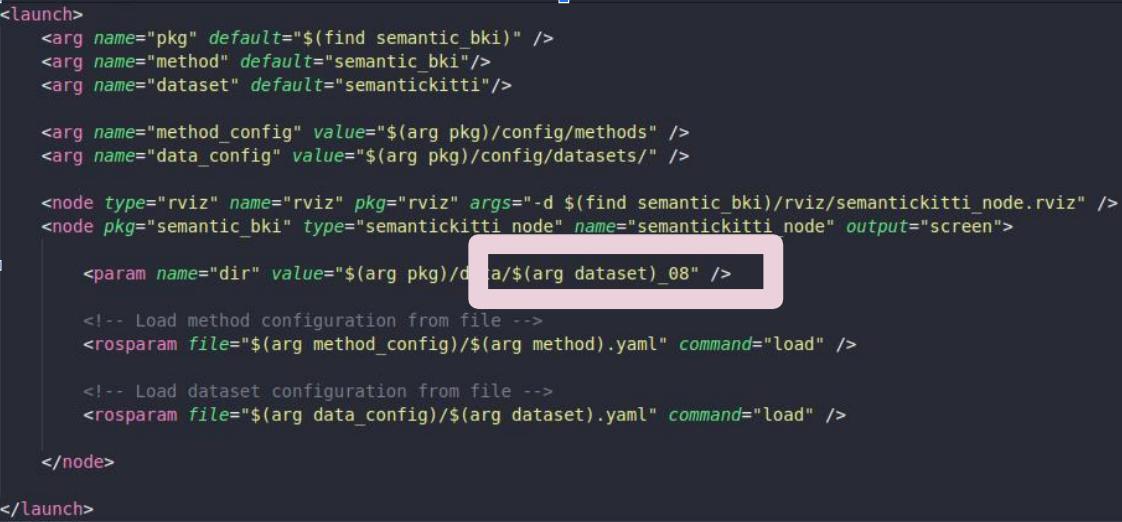
and then, the config file as described in the next section.
All parameters can be tuned from the .config file located in config/.
- sequence_no: Enter an integer here specifying sequence number if you're modifying the SemanticKITTI configuration file.
- resolution: Enter the resolution of the map that you are building
- spatiotemporal: Set to true if you have scene flow data, else false (for static mapping)
- query: Set to false if you don't want to do a quantitative evaluation every scan
- visualize: Set to true if you want to visualize the map in RViz
- moving_classes: Provide a list of the class IDs that are considered "dynamic." If you wish, you can set movable static objects to dynamic. Put 0 in the list of dynamic classes if you have at least one dynamic class.
- free_resolution: Set free space sampling resolution (if you set to a high value like 100, there will be no free space sampling resolution)
- ds_resolution: Set downsampling resolution for any incoming point cloud. Up to you.
- free_sample: This parameter is introduced because we need to handle datasets differently when you sample for free space. Let's say you don't sample for free space due to the sheer size of the point set (e.g. SemanticKITTI)! In this case, there are no observations belonging to the class "free." Set ,free_sample to false in this case. Now, for the Gazebo simulation, the point set is smaller, so we can sample along the ray and add free observations. In this case, we set this parameter to true.
- ell & flow_ell: ell is for the original map. Keep it about 2.5x the map resolution and flow_ell around the same.
- flow_sf2: Increase this if traces aren't disappearing. Decrease if the dynamic object is not being represented.
Evaluation code is provided in TODO. You may modify the directory names to run it. Check out semantic-kitti-api for documentation about evaluation.
If you found this code useful, please cite the following: Dynamic Semantic Occupancy Mapping using 3D Scene Flow and Closed-Form Bayesian Inference (PDF)
@misc{unnikrishnan2021dynamic,
title={Dynamic Semantic Occupancy Mapping using 3D Scene Flow and Closed-Form Bayesian Inference},
author={Aishwarya Unnikrishnan and Joseph Wilson and Lu Gan and Andrew Capodieci and Paramsothy Jayakumar and Kira Barton and Maani Ghaffari},
year={2021},
eprint={2108.03180},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Bayesian Spatial Kernel Smoothing for Scalable Dense Semantic Mapping (PDF)
@ARTICLE{gan2019bayesian,
author={L. {Gan} and R. {Zhang} and J. W. {Grizzle} and R. M. {Eustice} and M. {Ghaffari}},
journal={IEEE Robotics and Automation Letters},
title={Bayesian Spatial Kernel Smoothing for Scalable Dense Semantic Mapping},
year={2020},
volume={5},
number={2},
pages={790-797},
keywords={Mapping;semantic scene understanding;range sensing;RGB-D perception},
doi={10.1109/LRA.2020.2965390},
ISSN={2377-3774},
month={April},}
Learning-Aided 3-D Occupancy Mapping with Bayesian Generalized Kernel Inference (PDF)
@article{Doherty2019,
doi = {10.1109/tro.2019.2912487},
url = {https://doi.org/10.1109/tro.2019.2912487},
year = {2019},
publisher = {Institute of Electrical and Electronics Engineers ({IEEE})},
pages = {1--14},
author = {Kevin Doherty and Tixiao Shan and Jinkun Wang and Brendan Englot},
title = {Learning-Aided 3-D Occupancy Mapping With Bayesian Generalized Kernel Inference},
journal = {{IEEE} Transactions on Robotics}
}








