![]()
a road space model transformer library for OpenDRIVE, CityGML and beyond
View Demos
·
Report Bug
·
Request Feature



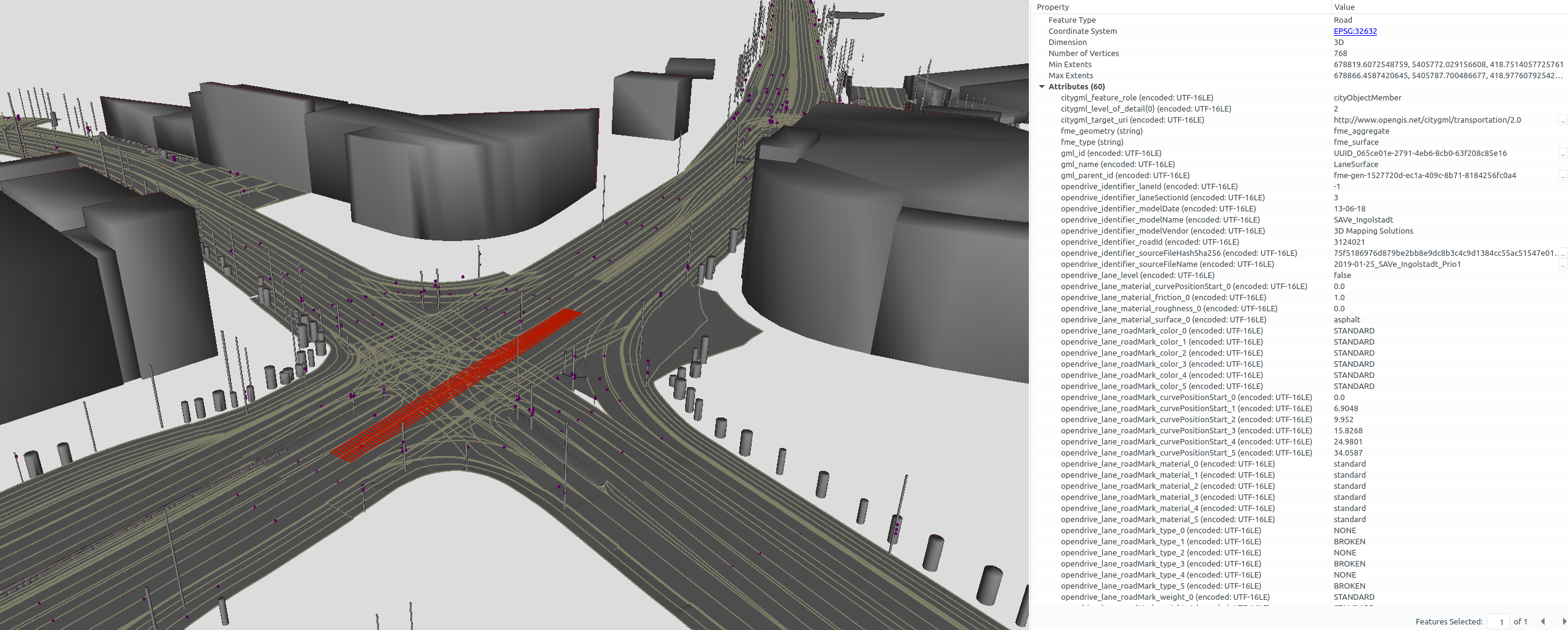
r:trån reads road network models in OpenDRIVE and transforms them to the virtual 3D city model standard CityGML.
This enables you to
- inspect your spatio-semantic road space models
- conduct further model transformations with tools like FME
- perform geospatial analyses on the 3D City Database
- deploy virtual globes
- load your models into a desktop GIS
Download some sample OpenDRIVE datasets of the city of Ingolstadt from the company 3D Mapping Solutions (initial registration required). Additionally, awesome-openx provides a list of further OpenDRIVE datasets.
In order to use r:trån you need JDK 11 or later. Download the prebuilt JAR executable from the releases section and make sure that you have at least a JVM 11. Run r:trån to ...
# … validate OpenDRIVE datasets
java -jar rtron.jar validate-opendrive ./input-opendrive ./output-reports
# … transform OpenDRIVE datasets to CityGML
java -jar rtron.jar opendrive-to-citygml ./input-opendrive ./output-citygmlR:trån recursively iterates over your OpenDRIVE input datasets and creates the same directory structure for the output folder.
Clone the repo and let gradle build it:
./gradlew shadowJar # build the uber-jar
cd rtron-cli/build/libs
java -jar rtron-*.jarYou're good to go 💪
r:trån was developed so that everyone can benefit from spatio-semantic road space models. Therefore, bug fixes, issue reports and contributions are greatly appreciated.
The software r:trån can be cited using the .
If you use this software, please cite one of the supplemental research articles:
- Spatio-Semantic Road Space Modeling for Vehicle-Pedestrian Simulation to Test Automated Driving Systems
- Validation of Parametric OpenDRIVE Road Space Models
These papers may also be of interest:
- Detailed Streetspace Modelling for Multiple Applications: Discussions on the Proposed CityGML 3.0 Transportation Model
- Requirement Analysis of 3D Road Space Models for Automated Driving
- CityGML and the streets of New York - A proposal for detailed street space modelling
r:trån is distributed under the Apache License 2.0. See LICENSE for more information.
- Lutz Morich and AUDI AG for providing an awesome work environment within SAVe
- Prof. Thomas H. Kolbe, Bruno Willenborg and Christof Beil for support and feedback
- Claus Nagel for citygml4j
- JetBrains for Kotlin and their top-notch IDEs



























































