
This repository integrates Infineon's XMC microcontrollers into the Arduino IDE and PlatformIO IDE.
- XMC1100 XMC 2Go
- XMC1100 Boot Kit
- XMC1300 Boot Kit
- XMC1400 Kit for Arduino
- XMC4200 Platform 2Go
- XMC4400 Platform 2Go
- XMC4700 Relax Kit
Please visit also the Wiki for additional information, e.g. datasheets, pin out diagrams, etc.:
- Page for XMC1100 XMC 2Go
- Page for XMC1100 Boot Kit
- Page for XMC1300 Boot Kit
- Page for XMC1400 Kit for Arduino
- Page for XMC4200 Platform 2Go
- Page for XMC4400 Platform 2Go
- Page for XMC4700 Relax Kit
Additionally, please consult the releases for information about the changes and new versions.
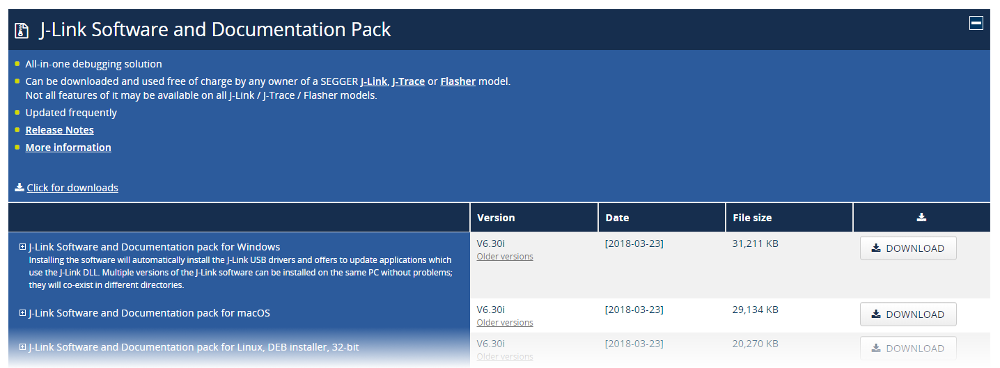
In order to use and program the Infineon XMC microcontrollers in the Arduino IDE, SEGGER J-Link must be installed on your PC. Please follow this link to SEGGER J-Link and install the J-Link Software and Documentation Pack for your operating system. If you have already installed 'DAVE™ - Development Platform for XMC™ Microcontrollers', you can skip this step as the respective drivers/programs are already installed on your system.
XMC-for-Arduino requires Python 3.x and pyserial. Make sure Python is installed in your machine and available in the system path.
You can check if it was successfully installed by opening your command line or terminal and typing:
python --version
With pip available, install the mentioned packages from a terminal:
pip install pyserial
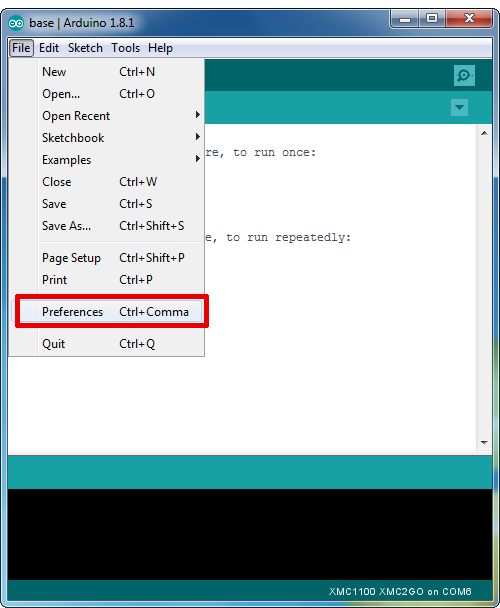
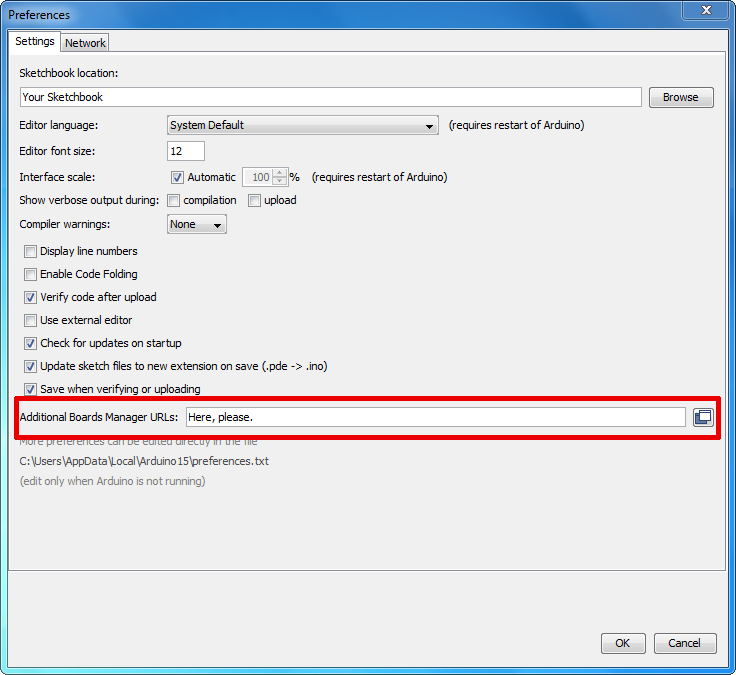
Paste the following URL into the 'Additional Boards Manager URLs' input field under File > Preferences to add Infineon's microcontroller boards to the Arduino IDE.
https://github.com/Infineon/XMC-for-Arduino/releases/latest/download/package_infineon_index.json
Easier to copy (no clickable link):
https://github.com/Infineon/XMC-for-Arduino/releases/latest/download/package_infineon_index.json
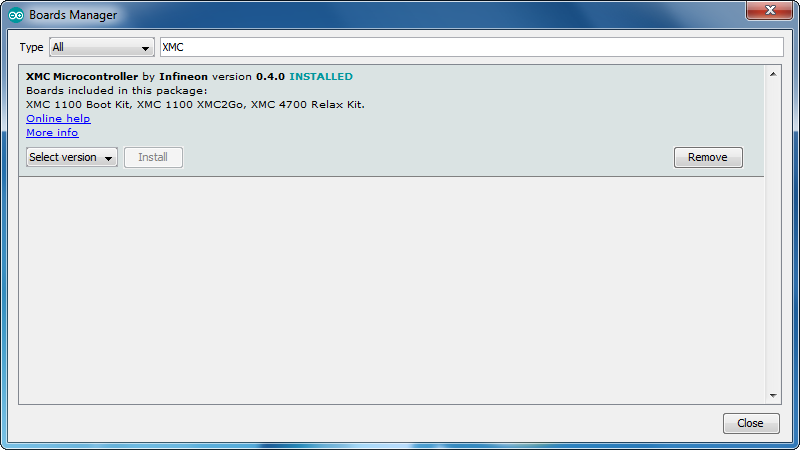
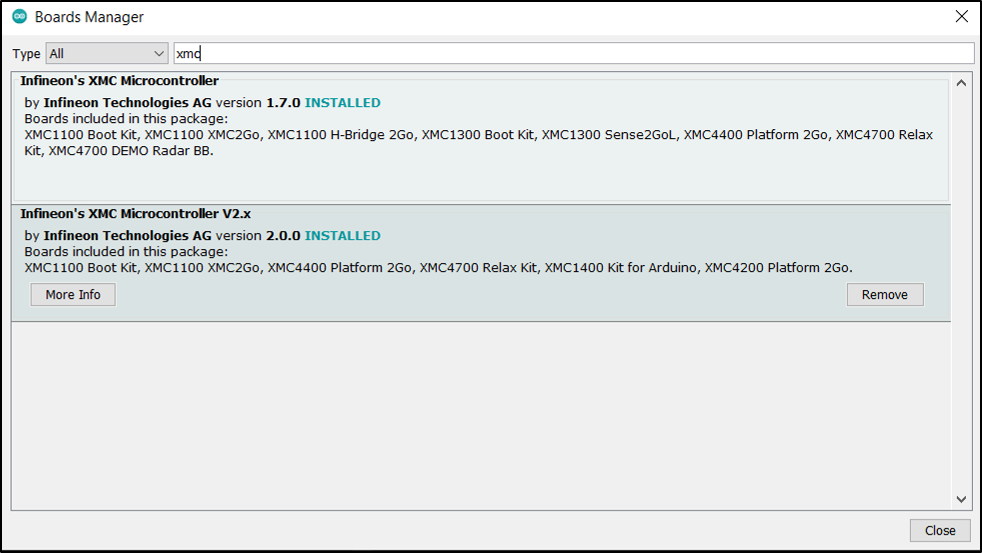
To install the boards, please navigate to Tools > Board > Boards Manager... and search for XMC. You will find options to install the board files for the microcontrollers. Click "Install" to add the boards to your Arduino IDE.
Note: For information on separation of release packages from version 2.0.0 onwards, see below.
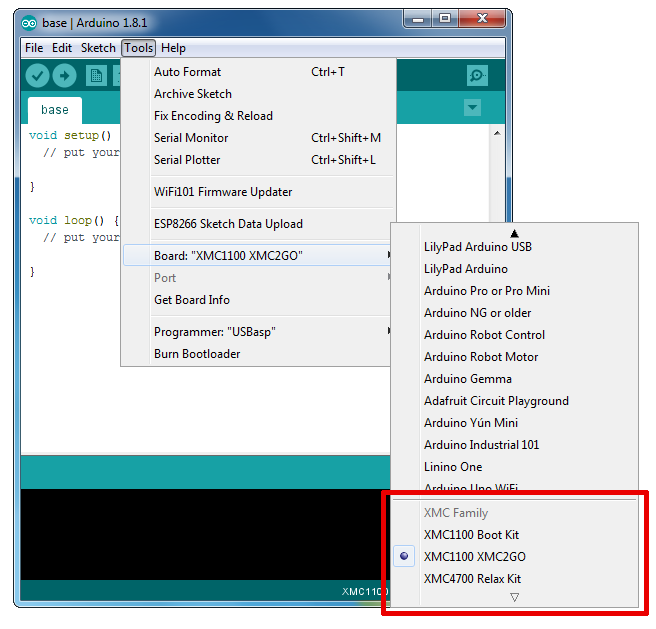
In the boards list Tools > Board, the XMC microcontroller boards are added and can be used from now on.
Important Notes
- This integration will only work for Arduino IDE >=1.5
- The XMC1100 Boot Kit has limitations if compared to the official Arduino boards (consult the XMC-for-Arduino Wiki for more information)
- Refer also to the LICENSE.md/txt file for further information
- Arduino 1.8.0 IDE might have problems with the XMC-for-Arduino releases
- XMC-for-Arduino support for 'arm-linux-gnueabihf' only until version 1.1.
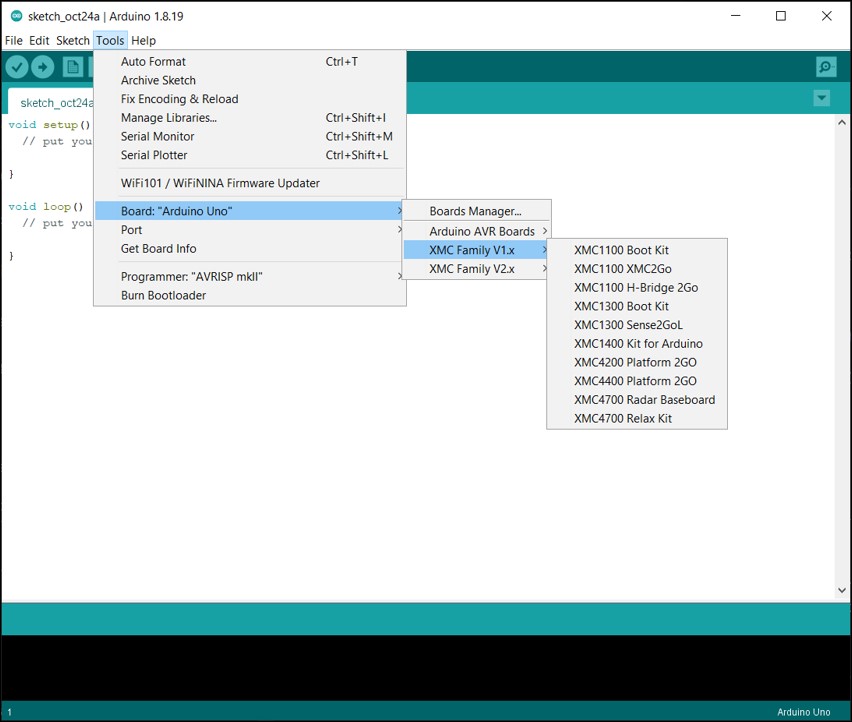
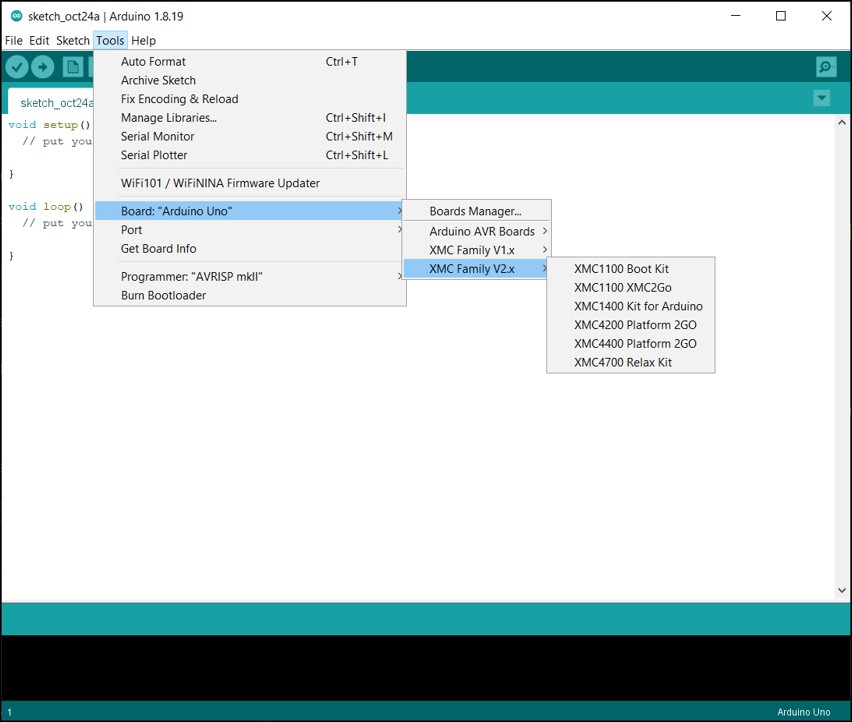
Certain obsolete boards (see wiki) and non-functional libraries were removed from the board support package for the release version 2.0.0, alongwith some other major changes (see release notes). However, in order to support legacy code, these removed boards/libraries are still available as a part of release version 1.7.0. Hence, the release packages have been split as shown in the pictures below.
The boards until version 1.7.0 have been clubbed under XMC Family V1.x.
Any new board or feature integration will only be done in the XMC Family V2.x
⚠️ While using the pins connected to the LEDs configured as INPUT, there might be some abberation in behavior due to the presence of the series resistor of the LED, as it causes a voltage drop on the pin. In case of such an occurance, it is advised to desolder the series resistor and the LED and thereby using the pin as INPUT.
- What is PlatformIO?
- PlatformIO IDE
- PlatformIO Core (CLI) (command line tool)
- Integration with Cloud and Desktop IDEs - Cloud9, Codeanywhere, Eclipse Che (Codenvy), Atom, CLion, Eclipse, Emacs, NetBeans, Qt Creator, Sublime Text, VIM, Visual Studio, and VSCode
- Project Examples
To contribute enhancements, fixes and the like see Contributors.md. in root folder
Third Party or external library maintainers see Libraries.md. in root folder
Also see Wiki for any additional information








































































































































