
计算车辆当在全局坐标的当前位置(x,y,z,roll,pitch,yaw),使用LIDAR的扫描数据和预先构建的地图信息。autoware推荐使用正态分布变换(NDT)算法来匹配激光雷达当前帧和3D map。
转换GNSS接收器发来的NEMA/FIX消息到位置信息(x,y,z,roll,pitch,yaw)。结果可以被单独使用为车辆当前位置,也可以作为lidar_localizar的初始参考位置。 dead_reckoner 主要使用IMU传感器预测车辆的下一帧位置,也可以用来对lidar_localizar和gnss_localizar的结果进行插值。
从激光雷达单帧扫描读取点云信息,提供基于激光雷达的目标检测。主要使用欧几里德聚类算法,从地面以上的点云得到聚类结果。除此之外,可以使用基于卷积神经网路的算法进行分类,包括VoxelNet,LMNet.
读取来自摄像头的图片,提供基于图像的目标检测。主要的算法包括R-CNN,SSD和Yolo,可以进行多类别(汽车,行人等)实时目标检测。
使用image_detector的检测结果完成目标跟踪功能。算法基于Beyond Pixels,图像上的目标跟踪结果被投影到3D空间,结合lidar_detector的检检测结果输出最终的目标跟踪结果。
输入激光雷达的单帧扫描点云和摄像头的图片信息,进行在3D空间的更准确的目标检测。激光雷达的位置和摄像头的位置需要提前进行联合标定,现在主要是基于MV3D算法来实现。
将lidar_detector和image_detector的检测结果进行融合,image_detector 的识别类别被添加到lidar_detector的聚类结果上。
预测检测目标的下一步位置,跟踪的结果可以被进一步用于目标行为分析和目标速度分析。跟踪算法主要是基于卡尔曼滤波器。
使用目标跟踪的结果来预测临近物体的未来行动轨迹,例如汽车或者行人。
使用moving_predictor的结果来进一步预测未来是否会与跟踪目标发生碰撞。输入的信息包括车辆的跟踪轨迹,车辆的速度信息和目标跟踪信息。
寻找到达目标地点的全局路径,路径由道路网中的一系列十字路口组成。
根据route_planner发布的一系列十字路口结果,确定全局路径由哪些lane组成,lane是由一系列waypoint点组成
可以被用于产生到达目的地的一系列waypoint点,它与lane_planner的不同之处在于它是发布单一的到达目的地的waypoint路径,而lane_planner是发布到达目的地的一系列waypoint数组。
是一个保存和加载手动制作的waypoint文件的工具。为了保存waypoint到文件里,需要手动驾驶车辆并开启定位模块,然后记录车辆的一系列定位信息以及速度信息, 被记录的信息汇总成为一个路径文件,之后可以加载这个本地文件,并发布需要跟踪的轨迹路径信息给其他规划模块。
更新车辆速度信息,注意到给定跟踪的waypoint里面是带有速度信息的,这个模块就是根据车辆的实际状态进一步修正速度信息,以便于实现在停止线前面停止下来或者加减速等等。
实现Hybrid-State A*查找算法,生成从现在位置到指定位置的可行轨迹,这个模块可以实现避障,或者在给定waypoint下的急转弯,也包括在自由空间内的自动停车。
实现了State Lattice规划算法,基于样条曲线,事先定义好的参数列表和语义地图信息,在当前位置前方产生了多条可行路径,可以被用来进行障碍物避障或车道线换道。
这个模块实现了 Pure Pursuit算法来实现轨迹跟踪,可以产生一系列的控制指令来移动车辆,这个模块发出的控制消息可以被车辆控制模块订阅,或者被线控接口订阅,最终就可以实现车辆自动控制。
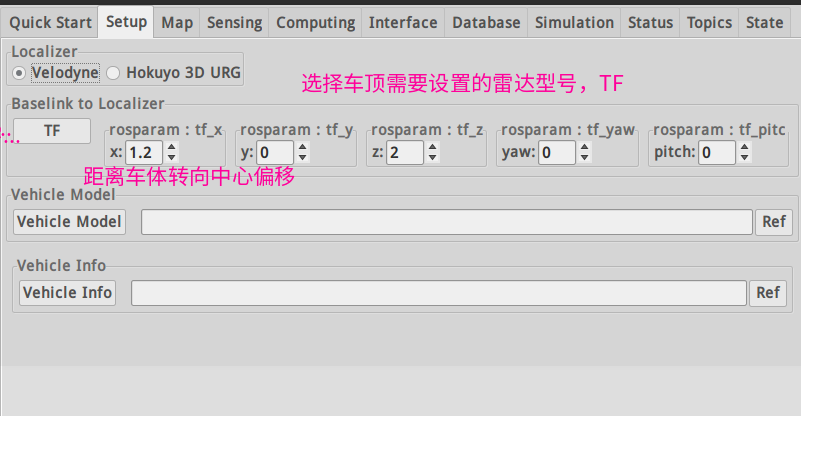
- 设置激光雷达的TF树
- Vehicle model:在RVIZ中的车体信息

- /base_link 所在的坐标系
- 在RVIZ可视化的str
- 显示的尺寸
- urdf文件,建模文件
- joint_state_publisher 加入tf树

- guid 是需要填入安装具体对象的对应的摄像头出厂编号
- ip可以设置为静态,从官方工具中查看
- camera_info_url : 相机标定的参数,最好用MATLAB工具进行标定
- acquisition rate : 摄像头帧率
- 像素格式选择默认
- exposure:曝光参数需要和镜头光圈大小同时调整
- 如果是近焦之后的参数选择默认就好
- 此摄像头驱动 ros package 需要放入相关文件夹后重新编译安装
- 雷达驱动IP始终为静态ip,所以直接launch

分为点云降采样,点云预处理,多激光雷达初始矫正
- 点云降采样根据情况所需选择合适的算法,只能运行其中一个。大多选择voxel_grid_filter
- 点云预处理根据不同激光雷达算法选择是否启动。多和lidar trac有关
- Fusion
This package allows to obtain the extrinsic calibration between two PointClouds with the help of the NDT algorithm.
The multi_lidar_calibrator node receives two PointCloud2 messages (parent and child), and an initialization pose.
If possible, the transformation required to transform the child to the parent point cloud is calculated, and output to the terminal.
-
You'll need to provide an initial guess, otherwise the transformation won't converge.
-
In a sourced terminal:
Using rosrun
rosrun multi_lidar_calibrator multi_lidar_calibrator _points_child_src:=/lidar_child/points_raw _points_parent_src:=/lidar_parent/points_raw _x:=0.0 _y:=0.0 _z:=0.0 _roll:=0.0 _pitch:=0.0 _yaw:=0.0
Using roslaunch
roslaunch multi_lidar_calibrator multi_lidar_calibrator points_child_src:=/lidar_child/points_raw points_parent_src:=/lidar_parent/points_raw x:=0.0 y:=0.0 z:=0.0 roll:=0.0 pitch:=0.0 yaw:=0.0
-
Play a rosbag with both lidar data
/lidar_child/points_rawand/lidar_parent/points_raw -
The resulting transformation will be shown in the terminal as shown in the Output section.
-
Open RViz and set the fixed frame to the Parent
-
Add both point cloud
/lidar_parent/points_rawand/points_calibrated -
If the algorithm converged, both PointClouds will be shown in rviz.
| Parameter | Type | Description |
|---|---|---|
points_parent_src |
String | PointCloud topic name to subscribe and synchronize with the child. |
points_child_src |
String | PointCloud topic name to subscribe and synchronize with the parent. |
voxel_size |
double | Size of the Voxel used to downsample the CHILD pointcloud. Default: 0.5 |
ndt_epsilon |
double | The transformation epsilon in order for an optimization to be considered as having converged to the final solution. Default: 0.01 |
ndt_step_size |
double | Set/change the newton line search maximum step length. Default: 0.1 |
ndt_resolution |
double | Size of the Voxel used to downsample the PARENT pointcloud. Default: 1.0 |
ndt_iterations |
double | The maximum number of iterations the internal optimization should run for. Default: 400 |
x |
double | Initial Guess of the transformation x. Meters |
y |
double | Initial Guess of the transformation y. Meters |
z |
double | Initial Guess of the transformation z. Meters |
roll |
double | Initial Guess of the transformation roll. Radians |
pitch |
double | Initial Guess of the transformation pitch. Radians |
yaw |
double | Initial Guess of the transformation yaw. Radians |
- Child Point cloud transformed to the Parent frame and published in
/points_calibrated. - Output in the terminal showing the X,Y,Z,Yaw,Pitch,Roll transformation between child and parent. These values can be used later with the
static_transform_publisher.
transformation from ChildFrame to ParentFrame
This transformation can be replicated using:
rosrun tf static_transform_publisher 1.7096 -0.101048 -0.56108 1.5708 0.00830573 0.843 /ParentFrame /ChildFrame 10
The figure below shows two lidar sensors calibrated by this node. One is shown in gray while the other is show in blue. Image obtained from rviz.

暂时用到的(2019/03/19)
- NDT相关
- 视觉识别跟踪
- 激光雷达识别跟踪
- 激光-视觉融合设置属性判断碰撞
- 交通灯识别

-
具体建图步骤见PDF
-
当数据包播放完成时NDT不一定同时完成建图,需要在Shell查看进度
-
点云地图比较稀疏时,定位容易丢失,调整scan范围比较有效
-
处理方式最好选用pcl_anh_gpu
-
在输出地图PCD时可以时分辨率变大,文件较小

-
在仿真环境下需要不断调整Initial pos 使得Z 方向的点云可以对齐匹配。还没有试过模拟GNSS 定位(LG的launch文件里没有用模拟GPS)
-
Predict Pose:参考NDT论文
-
Get Height 有助于提高定位速度(也是仿真时影响Z轴对齐的主要原因之一)
-
use odom 有助于成功率和精度

- 设置精度对匹配有一个简单的评价,显示NDT定位当前的状态(初始化状态,成功,丢失等)

- 此插件是将右方填入的话题数据准换为左边的名字,ROS 中remap的作用 是为了接受来自不同定位算法得到的位姿信息话题,提高灵活性 simulation模式是为了配合open_planner系列node进行路径动作规划进行仿真的选项,勾选后接收话题就为sim估计出来的位姿形成闭环,不是由NDT等提供了(即抛离定位模块,只和规划有关)
- 输出的/current_pose ,/current_velocity。是全局话题,之后的预测,规划,执行算法都严重依赖此话题
- name: /ff_waypoint_follower
publish: [/twist_raw, /wf_stat, /curr_simu_pose, /follow_pose, /sim_pose, /sim_velocity,
/twist_cmd, /ControlBoxOdom, /linear_velocity_viz]
subscribe: [/initialpose, /current_pose, /odom, /current_velocity, /current_behavior,
/final_waypoints, /usb_controller_r_signal]
- 把训练好的.weights文件放到
src\computing\perception\detection\vision_detector\packages\vision_darknet_detect\data下按照手册启动便会启动图像识别
Autoware package based on Darknet that supports Yolov3 and Yolov2 image detector.
- NVIDIA GPU with CUDA installed
- Pretrained YOLOv3 or YOLOv2 model on COCO dataset, Models found on the YOLO website.
- The weights file must be placed in
vision_darknet_detect/darknet/data/.
-
From a sourced terminal:
roslaunch vision_darknet_detect vision_yolo3_detect.launchroslaunch vision_darknet_detect vision_yolo2_detect.launch
-
From Runtime Manager:
Computing Tab -> Detection/ vision_detector -> vision_darknet_detect
You can change the config and weights file, as well as other parameters, by clicking [app]
Launch file available parameters:
| Parameter | Type | Description |
|---|---|---|
score_threshold |
Double | Detections with a confidence value larger than this value will be displayed. Default 0.5. |
nms_threshold |
Double | Non-Maximum suppresion area threshold ratio to merge proposals. Default 0.45. |
network_definition_file |
String | Network architecture definition configuration file. Default yolov3.cfg. |
pretrained_model_file |
String | Path to pretrained model. Default yolov3.weights. |
camera_id |
String | Camera workspace. Default /. |
image_src |
String | Image source topic. Default /image_raw. |
names_file |
String | Path to pretrained model. Default coco.names. |
| Topic | Type | Objective |
|---|---|---|
/image_raw |
sensor_msgs/Image |
Source image stream to perform detection. |
/config/Yolo3 |
autoware_config_msgs/ConfigSSD |
Configuration adjustment for threshold. |
| Topic | Type | Objective |
|---|---|---|
/detection/vision_objects |
autoware_msgs::DetectedObjectArray |
Contains the coordinates of the bounding box in image coordinates for detected objects. |
分割线
#这是一个简单示例
Velodyne 32C is a new Lidar while driver and calibration file should be updated.
These files has been saved to Velodyne32C
Copy Velodyne 32C launch file to the following address:
Autoware/ros/src/sensing/drivers/lidar/packages/velodyne/velodyne_pointcloud/launch/32c_points.launch
Copy Velodyne 32C calibration yaml file to the following address:
Autoware/ros/src/sensing/drivers/lidar/packages/velodyne/velodyne_pointcloud/params/VLP-32C.yaml
Copy Velodyne 32C driver cc file to the following address:
Autoware/ros/src/sensing/drivers/lidar/packages/velodyne/velodyne_driver/src/driver/driver.cc
Velodyne 32C factor distance to resolution is different from others Velodyne products, this factor should be modified as following:
- driver file
Autoware/ros/src/sensing/drivers/lidar/packages/velodyne/velodyne_pointcloud/src/lib/rawdata.cc
- Change
float distance = tmp.uint * DISTANCE_RESOLUTION;tofloat distance = tmp.uint * 0.004;
- Install ros-velodyne driver:
sudo apt-get install ros-VERSION-velodyne
- Connect velodyne 32C and disconnect wifi
- Velodyne 32C IP setting
- Robot Cafe car: 192.168.1.201
- Civic: 192.168.0.201
- Computer IP set with in Lidar net, e.g. (robot cafe car 192.168.1.100; Civic 192.168.0.100)
- View Lidar data
roslaunch velodyne_pointcloud 32c_points.launch
rosrun rviz rviz -f velodyne
ROS Velodyne driver install and connect guide
The computer ip should be set in Lidar net but last not 201 (which is for Lidar).
The Lidars ip can be set same ip.
Make sure you have connected with Lidar successfully and have enough free disk space.
roslaunch velodyne_pointcloud 32c_points.launch
rosrun rviz rviz -f velodyne
rosbag record -a
- Load simulation rosbag file, play and pause.
- Change rosbag topic name to /points_raw
- The demo.rosbag can be used here for following tutorial.
The above two step can be done with the following commands:
rosbag play -r 0.7 bag_name.bag /velodyne_points:=/points_raw
You can use space button to stop and play rosbag in ternimal.
- Downsample rosbag files with voxel_grid_filter.

 When you click ROSBAG Record stop button, the new downsample rosbag will be saved.
When you click ROSBAG Record stop button, the new downsample rosbag will be saved.
- Change downsample rosbag topic name to /points_raw
rosbag play -r 0.7 bag_name.bag /filtered_points:=/points_raw
- Active ndt_localizer | ndt_mapping
- waypoint_maker | waypoint_saver
- Run whole simulation rosbag
- Output pcb


- Save waypoints





- The Velodyne default topic name is velodyne_points.
- The downsample rosbag default topic name is filtered_points/
- Please confirm voxel_grid_filter and ROSBAG Record topic name agree with rosbag playing.
- You can check topic data available or not using Autoware Topics.
- Make sure modify app parameters first then active related nodes function.

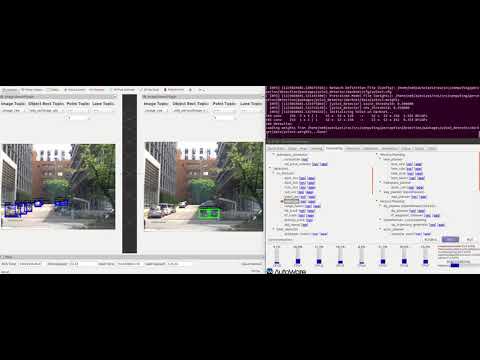
Here is simulation process and rviz visualization with generated pcb and waypoints file.
- Setup, sensing
- Load Map load pcb, waypoints file
- Computing setting
- Rviz to simulate
- If error please check every settings and redo it again.
- Make sure active vel_pose_connect in Simulation Mode.
- Make sure waypoint_follower is waypoint.


- Make sure deactive vel_pose_connect Simulate Mode.
- Make sure deactive waypoint_follower | wf_simulator.

- Make sure velocity_set | Points_topics is points_no_ground.


- Autoware Lidar obstacle detection function will false detect upslope as obstacle and don't move.
- The dataset should be big and diversity enough to prevent deep learning model over fitting.
- LSTM model has been used instead of CNN model to consider time serial.
- Police gesture detection have been localized for different countries.
- Through we have control robot cafe car through CAN, the driving performance is really bad, especially on upslope.
- There are still a lot of improvement potential for vehicle OEM and Tier1 e.g. Bosch to do in the hardware and CAN control.
