这是一款半双工,SDI-12与RS485协议相互转换的有源信号转换器
目录
第一章、 项目概述 4
产品概述 4
功能描述 4
参考文档 4
第二章、 总体设计路线 4
研发树状图 4
设计方向以及外壳样式 5
第三章、 通讯组件设计 6
第四章、 STM32最小系统设计 7
第五章、 电源组件设计 11
第六章、 模块软件设计 12
第七章、 实物展示 24
第八章、 转换器使用说明 26
设计一款半双工,SDI-12转RS485的有源信号转换模块
- 小型化设计:50*30mm,预留安装孔。
- 快速反应设计:数据在单片机停留时间尽可能短,读取到后直接传输出去
- 透明传输设计:双向数据不加修改不做变换直接传输
- 防水设计:安装在IP68防水外壳中
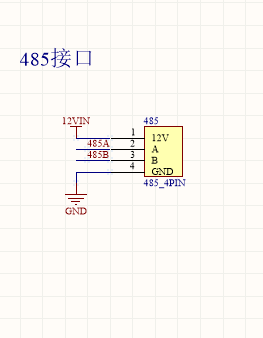
- 硬件接口:4pin接线柱,间距3.96
- MINI_SDI-12转DA-串口TTL-RS485透传模块说明书_20191014
- RELAYSCTRL.SchDoc
- 光耦.SchDoc
- TEROS21传感器调研记录.docx



- 芯片(模组)硬件手册,AT指令手册等数据资料
- 规范绘制模组,元件封装并考虑日后重用
- 依次设计原理图
- 设计过程中考虑布局以及后期外壳制作的问题,充分考虑信号抗干扰、屏蔽保护的问题
- 具体通信模组:
- TTL转485芯片
使用的是SN65LBC184芯片,功能是实现TTL转RS485协议

- TTL转SDI-12电路
使用的芯片是SN74AVC1T45,功能是使3.3V提升到3.6V输出或反向输入

- 在功能满足,性能满足的条件下首选STM32F030C8T6
- 外围电路参考最小系统板开发
- 最小系统包括:主控芯片,复位电路,调试接口,外部晶振,电源,启动方式,去耦电路,指示灯
主控芯片使用的是STM32030C8T6,供电是3.3V能源


主芯片程序下载采用SWD接口电路,SWD接口包括VDD,SWIO,WOCLK,GND四线



用于主控芯片的滤波,PCB设计时应分布在主控芯片能源附近

两盏状态指示灯LED1和LED2,进行系统状态的显示.LED10和KED11分别和主芯片GPIO管脚和地连接.串联电阻为限流电阻,防止电流过大损坏发光二极管

使用芯片MP2315进行电压的转换

使用芯片RT9193进行电压转换,主要给主控芯片供电

使用芯片LM317进行电压转换,主要给TTL转SDI-12芯片供电

SDI-12转RS485转换器需要实现的功能是实现两种不同协议的半双工通信转换,其中的难点在于不同协议的实现和半双工。
SDI-12协议:因为SDI-12协议是反逻辑的,所以不能使用常规STM32模块提供的串口进行通信,所以需要通过IO口来模拟串口通信,然后实现SDI-12协议通信。
RS485协议: RS485协议是透明传输,使用STM32提供的串口即可实现
半双工通信:要想实现模块的半双工通信,需要实现三部分内容——SDI-接口端实现半双工收发,RS485接口端实现半双工收发,整体模块的半双工收发

//初始化延迟函数
//SYSTICK的时钟固定为HCLK时钟的1/8
//SystemCoreClock:系统时钟
void delay_init(void)
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);//systick时钟= HCLK/8
fac_us = SystemCoreClock/8000000;
fac_ms = fac_us*1000;
} void RS485_init(void){
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/*时钟*/
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);//GPIOA组时钟使能
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOC, ENABLE);//GPIOC组时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口1时钟使能
/* 复用IO口*/
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);//复用串口1
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1);
/* 初始化复用口 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;//50MHZ
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽模式
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA9和PA10
/*初始化IO口*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA3,控制SDI的输入输出
GPIO_ResetBits(GPIOA ,GPIO_Pin_3);//默认接收,0接收,1发送
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA11,控制RS485输入输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_Level_3;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_Init(GPIOC, &GPIO_InitStructure);//PA13初始化IO口,显示输入输出标志
/* USARTx初始化 ----------------------------------------------------*/
USART_InitStructure.USART_BaudRate = 9600;//波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8位数据位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//1位停止位
USART_InitStructure.USART_Parity = USART_Parity_No;//不需要奇偶位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//接收和发送
USART_Init(USART1, &USART_InitStructure);//串口1初始化
/* NVIC初始化*/
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);//串口1中断初始化
/* 使能串口 */
USART_Cmd(USART1, ENABLE);//使能串口1
}A.IO模拟串口
因为传感器的时序是反逻辑的,所以STM32的串口是无法使用,所以需要自己使用IO口去模拟串口收发数据
a.接收串口IO
//接收初始化
void VirtualCOM_RX_GPIOConfig(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* PA2为数据输入,模拟RX */
GPIO_InitStructure.GPIO_Pin = COM_RX_PIN;//PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推免
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//下拉(SDI12是负逻辑)
GPIO_Init(COM_RX_PORT, &GPIO_InitStructure);//PA
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);//使能SYSCFG时钟
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource2);//PA2映射到中断线2
EXTI_InitStructure.EXTI_Line=EXTI_Line2;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Rising;//上升沿中断
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_Init(&EXTI_InitStructure);
NVIC_InitStructure.NVIC_IRQChannel=EXTI2_3_IRQn; //外部中断,边沿触发
NVIC_InitStructure.NVIC_IRQChannelPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_ClearITPendingBit(EXTI_Line2);//清除中断标志
GPIO_ResetBits(GPIOA ,GPIO_Pin_3);//0是接收
}b.发送IO初始化
//发送初始化
void VirtualCOM_TX_GPIOConfig(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* PA2最为数据输出口,模拟TX */
GPIO_InitStructure.GPIO_Pin = COM_TX_PIN;//PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推免
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//下拉,SDI12是负逻辑
GPIO_Init(COM_RX_PORT, &GPIO_InitStructure);//
GPIO_SetBits(COM_TX_PORT, COM_TX_PIN);
}B.SDI-12半双工初始化
因为SDI-12并没有硬件上的半双工管脚,所以使用软件使SDI-12接口半双工
a.发送半双工
//SDI半双工,发送
void Change_TX(void){
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitStructure.GPIO_Pin = COM_RX_PIN;//PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;//输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推免
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//下拉,SDI12是负逻辑
GPIO_Init(COM_TX_PORT, &GPIO_InitStructure);//PA
GPIO_SetBits(GPIOA ,GPIO_Pin_3);//1是发送
//关闭SDI外部中断
NVIC_InitStructure.NVIC_IRQChannel=EXTI2_3_IRQn; //外部中断,边沿触发
NVIC_InitStructure.NVIC_IRQChannelPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd=DISABLE;
NVIC_Init(&NVIC_InitStructure);
}b.接收半双工
//SDI半双工,接收
void Change_RX(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitStructure.GPIO_Pin = COM_RX_PIN;//PA2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推免
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;//下拉(SDI12是负逻辑)
GPIO_Init(COM_RX_PORT, &GPIO_InitStructure);//PA
GPIO_ResetBits(GPIOA ,GPIO_Pin_3);//0是接收
//外部中断打开
NVIC_InitStructure.NVIC_IRQChannel=EXTI2_3_IRQn; //外部中断,边沿触发
NVIC_InitStructure.NVIC_IRQChannelPriority = 2;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_Init(&NVIC_InitStructure);
EXTI_ClearITPendingBit(EXTI_Line2);//清除中断标志
}C.定时器初始化
需要一个定时器来按照一定频率去读取模拟IO口的数据
//定时器初始化
void TIM3_Configuration(u16 period)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);//使能TIM3的时钟
TIM_TimeBaseStructure.TIM_Prescaler = 48 - 1; //预分频系数为48,这样计数器时钟为48MHz/48 = 1MHz
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;//设置计数器模式为向上计数模式
TIM_TimeBaseStructure.TIM_Period = period - 1; //设置计数溢出大小,每计period个数就产生一个更新事件
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseStructure); //将配置应用到TIM3中
TIM_ClearFlag(TIM3, TIM_FLAG_Update); //清除溢出中断标志
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); //开启TIM3的中断
TIM_Cmd(TIM3,DISABLE); //关闭定时器TIM3
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //通道设置为TIM3中断
NVIC_InitStructure.NVIC_IRQChannelPriority = 1;//中断优先级1
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //打开中断
NVIC_Init(&NVIC_InitStructure);
}D.设置波特率
设置固定的频率给模拟串口IO
//设置波特率
void SDI_init(u16 baudRate)
{
u32 period;
VirtualCOM_TX_GPIOConfig();
VirtualCOM_RX_GPIOConfig();
if(baudRate == _300BuadRate) //波特率300
period = _300BuadRate + 300;
else if (baudRate == _600BuadRate) //波特率600
period = _600BuadRate + 300;
else if (baudRate == _1200BuadRate) //波特率1200
period = _1200BuadRate + 50;//采样
TIM3_Configuration(period); //设置对应模特率的定时器的定时时间
delayTime = baudRate; //设置IO串口发送的速率
}延时程序使用非常频繁,使设置波特率的关键,所以需要结合STM32的系统频率来编写准确的延时程序。
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD = nms*fac_ms;//时间加载
SysTick->VAL = 0x00; //清除计数器
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;///打开systick定时器,开始倒计时
do
{
temp = SysTick->CTRL;
}while((temp&0x01) && !(temp&(1<<16)));
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;//关闭systick定时器
SysTick->VAL = 0x00;//清除计数器
}
//延时nus
//nus为要延时的us数.
void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD = nus*fac_us; //时间加载
SysTick->VAL = 0x00; //清除计数器
SysTick->CTRL |= SysTick_CTRL_ENABLE_Msk;//打开systick定时器,开始倒计时
do
{
temp = SysTick->CTRL;
}while((temp&0x01) && !(temp&(1<<16)));
SysTick->CTRL &= ~SysTick_CTRL_ENABLE_Msk;//关闭systick定时器
SysTick->VAL = 0x00;//清除计数器
}SDI-12的方法分为有三部分:接收数据,解析数据和发送数据。在软件的设计上,我们通过外部中断来相应数据的接收(注意是反逻辑),然后通过定时器按照一定频率来解析接收到的时序,最后按照SDI-12协议发送数据
A.外部中断接收函数
enum{
COM_START_BIT, //停止位
COM_D0_BIT, //bit0
COM_D1_BIT, //bit1
COM_D2_BIT, //bit2
COM_D3_BIT, //bit3
COM_D4_BIT, //bit4
COM_D5_BIT, //bit5
COM_D6_BIT, //bit6
COM_D7_BIT, //bit7
COM_STOP_BIT, //bit8
};
u8 recvStat = COM_STOP_BIT; //定义状态机
//外部中断,字节起始位和启动定时中断
void EXTI2_3_IRQHandler(void)
{
Flag=0;
SDI_RX_FLAG = 1;//接收到数据
if(EXTI_GetITStatus(EXTI_Line2)!=RESET)
{
if(COM_RX_STAT) //检测引脚高低电平,如果是高电平,则说明检测到上升沿
{
if(recvStat == COM_STOP_BIT) //状态为停止位
{
recvStat = COM_START_BIT; //接收到开始位
TIM_Cmd(TIM3, ENABLE); //打开定时器,接收数据
}
}
EXTI_ClearITPendingBit(EXTI_Line2); //清除EXTI_Line2中断挂起标志位
}
}B.定时器解析数据函数
//定时中断,定时接收字节,负逻辑
void TIM3_IRQHandler(void)
{
if(TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //检测是否发生溢出更新事件
{
TIM_ClearITPendingBit(TIM3 , TIM_FLAG_Update);//清除中断标志
recvStat++; //改变状态机
len++;
if(recvStat == COM_STOP_BIT) //收到停止位
{
TIM_Cmd(TIM3, DISABLE); //关闭定时器
SDI_BUF[SDI_LEN] = recvData;
SDI_LEN++;
len=0;
return; //并返回
}
if(len==8 && !COM_RX_STAT){
recvData |= (1 << (recvStat - 1));//固定第八位为0(负逻辑为1)
return;
}
if(COM_RX_STAT) //'1',负逻辑是0
{
recvData |= (1 << (recvStat - 1));
}
else //'0'负逻辑是1
{
recvData &= ~(1 <<(recvStat - 1));
}
}
}C.SDI-12发送数据函数
//发送一个字节,取反发送
void VirtualCOM_ByteSend(u8 val)
{
u8 i = 0;
GPIO_SetBits(COM_TX_PORT, COM_TX_PIN); //起始位
delay_us(delayTime);
for(i = 0; i < 8; i++) //8位数据位
{
if(val & 0x01)
GPIO_ResetBits(COM_TX_PORT, COM_TX_PIN);
else
GPIO_SetBits(COM_TX_PORT, COM_TX_PIN);
delay_us(delayTime);
val >>= 1;
}
GPIO_ResetBits(COM_TX_PORT, COM_TX_PIN); //停止位
delay_us(delayTime);
}
//发送一串字符串
void VirtualCOM_StringSend(u8 *str,u8 len)
{
u8 t;
for(t = 0; t < len; t++)
{
VirtualCOM_ByteSend(str[t]);
}
}
//发送中断空号信号
void SDI_Send_signal(void){
GPIO_SetBits(COM_TX_PORT, COM_TX_PIN);//发送中断空号信号,持续12ms
delay_ms(13);
GPIO_ResetBits(COM_TX_PORT, COM_TX_PIN);//发送中断传号信号,持续8.33ms
delay_ms(8);
delay_us(530);
}
//检测是否需要重发,在不超过87ms不需要发送中断信号,之后仍然没有收到响应,100ms后传感器会进入睡眠状态
void SDI_CheckTimeOutAndSend(uint8_t *pBuf, uint8_t Len) {
int i = 0;
int k = 0;
for(k=0; k < 3; k++){
Change_TX();
SDI_Send_signal();//发送中断信号
for(i=0; i < 3; i++){
Change_TX();
VirtualCOM_StringSend(pBuf,Len);//PA2发送消息
Change_RX();
SDI_RX_FLAG = 0;
delay_ms(25);//等待25ms后判断传感器是否响应,否则需要重发
if(SDI_RX_FLAG == 1){
break;//接收到消息
}
}
if(SDI_RX_FLAG == 1){
break;
}
delay_ms(100);//等待100ms后再次发送中断信号重发
}
buf_len = 0;//RS485缓冲区清零
RS485_RX_LEN=0; //清零
SDI_RX_FLAG = 0;//接收标志位清0
}
//取反
void NOT(u8 *buf,u8 len){
int i=0;
for(i=0;i<len;i++){
buf[i] = ~buf[i];//取反
}
}RS485的方法分为有三部分:接收数据,解析数据和发送数据。在软件的设计上,我们通过串口来相应数据的接收,然后需要解析接收到的数据,最后按照RS485协议发送数据
A.接收数据
//串口1接收服务函数
void USART1_IRQHandler(void){
uint8_t res1;
Flag = 1;//半双工使能
//首先判断是否是接收中断
if(USART_GetITStatus(USART1,USART_IT_RXNE)){
//判断接收缓冲区是否为非空
while(!USART_GetFlagStatus(USART1,USART_FLAG_RXNE));
res1 = USART_ReceiveData(USART1);//临时变量获得接收值
if(RS485_RX_LEN<36)
{
RS485_RX_BUF[RS485_RX_LEN] = res1; //记录接收到的值
RS485_RX_LEN++; //接收数据增加1
}
}
}B.解析数据
/RS485查询和接收手到的数据
//buf:接收缓存首地址
//len:读到的数据长度
void RS485_Receive_Data(uint8_t *buf,uint8_t *len)
{
uint8_t rxlen=RS485_RX_LEN;
uint8_t i=0;
*len=0; //默认为0,*len是方便传参,否则void被调函数无法将变量传递出去
delay_ms(10); //等待10ms,连续超过10ms没有接收到一个数据,则认为接收结束
if(rxlen==RS485_RX_LEN&&rxlen)//接收到了数据,且接收完成了;==优先级高,先判断是否==再相与是否为空
{
for(i=0;i<rxlen;i++)
{
buf[i]=RS485_RX_BUF[i];
}
*len=RS485_RX_LEN; //记录本次数据长度
}
}C.发送数据
//RS485发送len个字节.
//buf:发送区首地址
//len:发送的字节数(这里建议不要超过64个字节)
void RS485_Send_Data(uint8_t *buf,uint8_t len)
{
uint8_t t;
GPIO_SetBits(GPIOA, GPIO_Pin_11); //设置为发送模式
for(t=0;t<len;t++) //循环发送数据
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET)
{
};//等待发送结束
USART_SendData(USART1,buf[t]); //发送数据
}
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET); //等待发送结束
SDI_LEN = 0; //SDI接收缓冲归零
GPIO_ResetBits(GPIOA, GPIO_Pin_11);//设置为接收模式
}实现RS485接收,SDI-12发送;
SDI-12接收,RS485接收
整体模块半双工通信
/* 头文件------------------------------------------------------------------*/
#include "main.h"
/* 参数定义 ---------------------------------------------------------*/
/*****SDI*************/
//波特率
#define u8 uint8_t
#define u16 uint16_t
#define u32 uint32_t
#define _300BuadRate 3150
#define _600BuadRate 1700
#define _1200BuadRate 833
//采样
#define COM_RX_STAT GPIO_ReadInputDataBit(COM_RX_PORT, COM_RX_PIN)
//缓冲
u8 SDI_BUF[36];
u8 SDI_LEN = 0;
u8 recvData;
u32 delayTime;//1比特需要发送和接收的时间
#define COM_RX_PORT GPIOA
#define COM_RX_PIN GPIO_Pin_2
#define COM_TX_PORT GPIOA
#define COM_TX_PIN GPIO_Pin_2
#define COM_DATA_HIGH() GPIO_SetBits(COM_TX_PORT, COM_TX_PIN) //高电平
#define COM_DATA_LOW() GPIO_ResetBits(COM_TX_PORT, COM_TX_PIN) //低电平
uint8_t SDI_12_EN = 0;//默认SDI端口处为接收模式,1发送,0接收
//接收缓存区
uint8_t SDI_RX_BUF[36]; //接收缓冲,最大64个字节.
//接收到的数据长度
uint8_t SDI_RX_LEN=0;
//接收标志位
uint8_t SDI_RX_FLAG = 0;//1是数据接收到了,0是没有接收到
//延时
static uint8_t fac_us=0;//us延时倍乘数
static uint16_t fac_ms=0;//ms延时倍乘数
/*******RS485**********/
//接收缓存区
uint8_t RS485_RX_BUF[36]; //接收缓冲,最大36个字节.
//接收到的数据长度
uint8_t RS485_RX_LEN=0;
uint8_t len = 0;
uint8_t Flag = 0;//半双工使能,flag=0,SDI→RS485;flag=1,RS485→SDI
uint8_t buf[36];//缓冲区
uint8_t buf_len = 0; //接收的数据长度
uint8_t res1 = 0;
/* 函数声明 -----------------------------------------------*/
void RS485_init(void);
void delay_init(void);
void delay_ms(uint16_t nms);
void delay_us(uint32_t nus);
void USART2_IRQHandler(void);
void SDI_Receive_Data(uint8_t *buf,uint8_t *len);
void SDI_Send_signal(void);
void SDI_USART2_SendBuf(uint8_t *pBuf, uint8_t Len);
void SDI_CheckTimeOutAndSend(uint8_t *pBuf, uint8_t Len);
void USART1_IRQHandler(void);
void RS485_Receive_Data(uint8_t *buf,uint8_t *len);
void RS485_Send_Data(uint8_t *buf,uint8_t len);
void Change_TX(void);
void Change_RX(void);
void VirtualCOM_RX_GPIOConfig(void);
void VirtualCOM_TX_GPIOConfig(void);
void SDI_init(u16 baudRate);
void TIM3_Configuration(u16 period);
void VirtualCOM_ByteSend(u8 val);
void VirtualCOM_StringSend(u8 *str, u8 len);
void NOT(u8 *buf,u8 len);/* 主函数 ---------------------------------------------------------*/
int main(void)
{
delay_init();
RS485_init();
SDI_init(_1200BuadRate);//设置波特率和SDI接收发送IO模拟串口初始化
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//使能接收中断
GPIO_ResetBits(GPIOA, GPIO_Pin_11);//默认485端口处为接收模式,1发送,0接收
while(1){
if(Flag){ //串口使能标志
//RS485接收,SDI发送
RS485_Receive_Data(buf,&buf_len);
if(buf_len != 0){
SDI_CheckTimeOutAndSend(buf,buf_len);
}
} else{
//SDI接收,RS485发送
if(SDI_LEN != 0) {
delay_ms(500);
NOT(SDI_BUF,SDI_LEN);//取反
RS485_Send_Data(SDI_BUF, SDI_LEN);
}
}
}
}


1.连接传感器:SDI-12接口有三个连接端——+12V,DATA, GND,分别连接传感器的三端(千万别搭错线,容易烧坏移位电位器芯片)
2.连接RS485器件:RS485接口有4个连接端——+12V,A,B,GND,分别连接RS485器件4端
3.通电,使用电脑发送命令即可
4.以下为通信的实物展示

