https://shop.pimoroni.com/products/pan-tilt-hat
Pan-Tilt HAT is a two-channel servo driver designed to control a tiny servo-powered Pan/Tilt assembly. It also controls either PWM-dimmed lights or WS2812 pixels; up to 24 RGB or 18 RGBW.
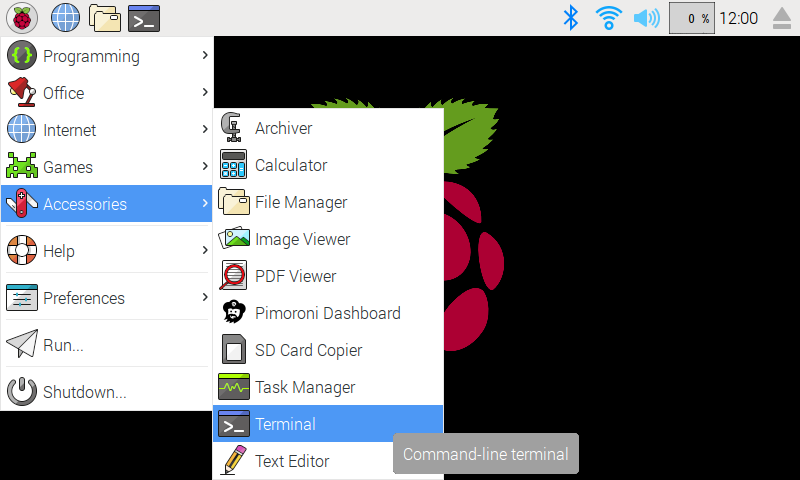
We've created an easy installation script that will install all pre-requisites and get your Pan-Tilt HAT up and running with minimal efforts. To run it, fire up Terminal which you'll find in Menu -> Accessories -> Terminal on your Raspberry Pi desktop, as illustrated below:
In the new terminal window type the command exactly as it appears below (check for typos) and follow the on-screen instructions:
curl https://get.pimoroni.com/pantilthat | bashEnable i2c:
sudo raspi-config nonint do_i2c 0Install the library:
python3 -m pip install pantilthatℹ️ Depending on your system, you might need to use sudo for the above command.
If you want to contribute, or like living on the edge of your seat by having the latest code, you should clone this repository, cd to the library directory, and run:
sudo python3 setup.py install(or sudo python setup.py install whichever your primary Python environment may be)
In all cases you will have to enable the i2c bus.
The breakout header on Pan Tilt HAT is connected directly to the GPIO pins.
Below is a map of the breakout functions and corresponding BCM pins:
| SDA | SCL | TX | RX | PWM | MOSI | MISO | SCLK | CEO |
|---|---|---|---|---|---|---|---|---|
| 2 | 3 | 14 | 15 | 18 | 10 | 9 | 11 | 8 |
- Guides and tutorials - https://learn.pimoroni.com/pan-tilt-hat
- Function reference - http://docs.pimoroni.com/pantilthat/
- GPIO Pinout - https://pinout.xyz/pinout/pan_tilt_hat
- Get help - http://forums.pimoroni.com/c/support
























































































































