Comments (7)
 osrf-migration
commented on August 19, 2024
osrf-migration
commented on August 19, 2024
Original comment by Yuki Furuta (Bitbucket: furushchev).
- Edited issue description
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by Ian Chen (Bitbucket: Ian Chen, GitHub: iche033).
The problem is most likely that What are the files in the turtlebot_description is in urdf format. Currently gzweb supports sdf only.turtlebot_description folder in assets?
Loading of models in gzweb is specific to gazebo model dir structure at the moment, and supports collada files only.
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by Ian Chen (Bitbucket: Ian Chen, GitHub: iche033).
We have this turtlebot_description model working in gzweb a while back, have not tested it recently though.
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by Kei Okada (Bitbucket: k-okada).
@furushchev, did you use spawn_model ? to publish robot model in gazebo from urdf? if so, it uses absolute path from package:// so you have to convert to model://, see ros-simulation/gazebo_ros_pkgs#288 or use something like
<!-- push robot_description to factory and spawn robot in gazebo -->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model"
args="-z 1.0 -unpause -urdf -model robot -file /tmp/robot.gazebo.urdf -package_to_model" respawn="false" output="screen">
<param name="dummy_to_generate_gazebo_urdf_file"
command="rosrun xacro xacro.py -o /tmp/robot.gazebo.urdf $(arg model)" />
<param name="dummy_to_convert_package_to_model"
command="sed -i s@package://@model://@g /tmp/robot.gazebo.urdf" />
</node>
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by Harmish Khambhaita (Bitbucket: harmishhk).
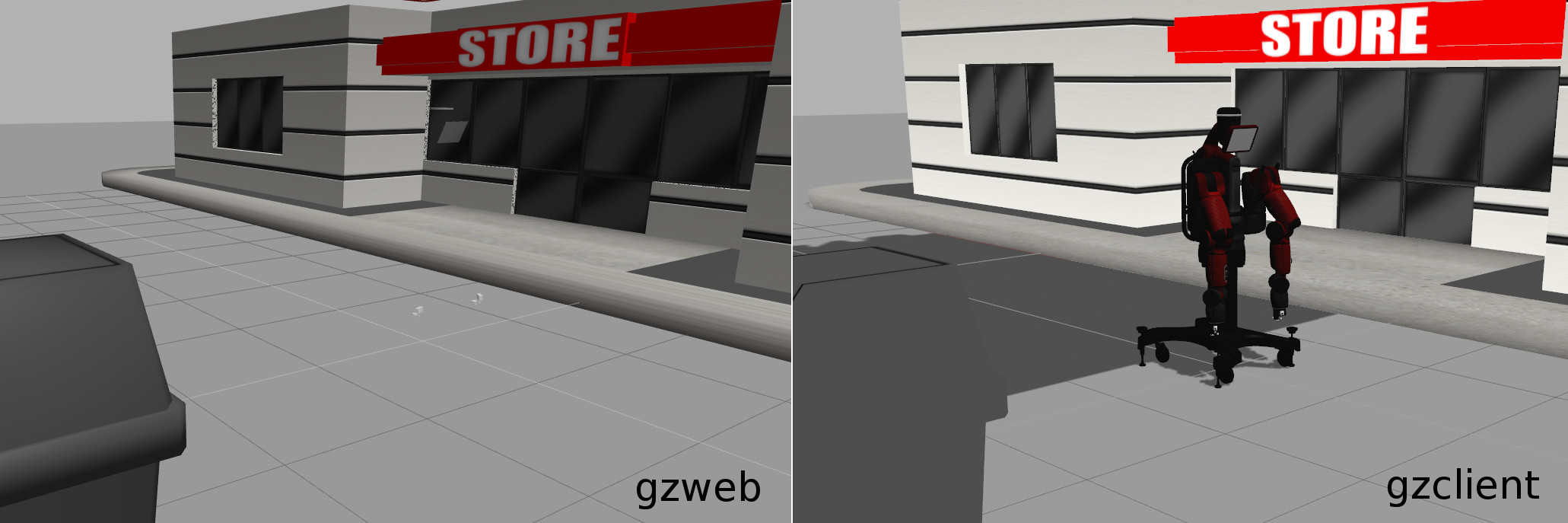
i am having similar problem for rendering baxter robot in gzweb. (as explained in this tutorial)
i cloned baxter_common from here, and added a model.config file inside baxter_description.
after executing following,
#!bash
source /usr/share/gazebo-5.0/setup.sh
export GAZEBO_MODEL_PATH=`rospack find baxter_common`:$GAZEBO_MODEL_PATH
cd /path/to/gzweb
./deploy.sh -m local
i get whole baxter_description directory copied to /path/to/gzweb/http/client/assets
the model renders just fine in gzclient but showing only few parts of the baxter robot in gzweb, as shown in the image belwo
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by Ricardo Tellez (Bitbucket: TheConstruct).
Hey Harmish,
it looks like your problem is exactly the same as the Yuki.
Looking inside the baxter_description at the link you provided, I see that the urdf/baxter.urdf contains the tag package:// when defining the mesh filenames.
If you want to load the model into the gzweb, it should say model://
For that, you have two options: either you change manually package by model, or you use the option -package_to_model with the urdf_spawner (as indicated by Kei Okada).
Luck!
from gzweb.
osrf-migration
commented on August 19, 2024
Original comment by ahmed (Bitbucket: ahmedkhrifi).
i have a model with extension urdf,then i need to import this model to GazeboWeb!!
from gzweb.
Related Issues (20)
- Meshes not visible but collisions are visible
- binary STL meshes not loading in gzweb
- Gzweb 1.4.0 does not install globally - Dependency problems HOT 4
- ros descriptions are ignored in deployment process HOT 1
- npm run deploy --- -m failed build HOT 5
- DAE ERROR Load files in complex robots are renderd as the first dae loaded HOT 2
- error: ‘v8::Handle’ has not been declared HOT 1
- building gzweb 1.4.0 against node 12 (Gazebo11/ROS2)
- roslib HOT 3
- node: /usr/include/boost/smart_ptr/shared_ptr.hpp:734: typename boost::detail::sp_member_access<T>::type = gazebo::transport::Publication*]: Assertionpx != 0' failed HOT 4
- URDF support ? HOT 2
- `npm run deploy` fails on gazebo11 and node 16.2 HOT 3
- Update install instructions
- Gazebo map showing on web browser
- npm start throws various errors
- traffic light model in gzweb
- gzweb models white or non-existent (both custom and standard) HOT 4
- URL in repo description is outdated HOT 1
- Why is gazebo running smoothly and gzweb too laggy. Is there a problem with my use? Can someone answer it? thank you HOT 4
- How to automatically change the angle of view of Gazebo in Gzweb? HOT 2
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from gzweb.