Illinois Space Society's flight software codebase for the TARS system.
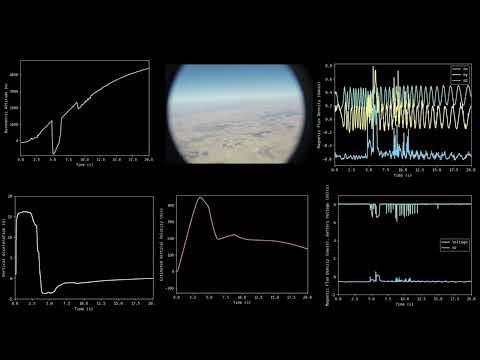
Click to see a cool video!
TARS/: Mission critical flight software running on TARS. This is the code that actually flies on the rocketsrc/: All the flight code that we write ourselves is in this directory.common/: Utility code we write that is used across microcontrollers.mcu_main/: Code for the primary microcontroller on TARS (Teensy 4.1)mcu_telemetry/: Code for the microcontroller in charge of telemetry and GPS (ESP32-S3)mcu_power: Code for the microcontroller on the power board (ATMega328P)
lib/: Third-party libraries that are not available on the PlatformIO Registry. Other libraries are included via thelib_depsbuild flag inplatformio.ini
ground/: Code running on ground station hardware (Adafruit LoRa Feather)
Please use the following naming conventions when creating branches while developing:
Your <branch-name> should consist of the Trello ticket ID and a short description of the work being done. For example:
AV-420-write-cp-location-interpolation-function
Then use the following scheme to then organize your branches:
<branch-name>for small and simple contributions pertaining to a ticketuser/<github-username>/<branch-name>for individual tasks or contributions, or as a sandbox for yourselffeature/<branch-name>for new functionality that didn't exist beforebug/<branch-name>for bug fixesgeneral/<branch-name>for overall repository organization or development pipeline tweaksmisc/<branch-name>orjunk/<branch-name>for just messing around :)
Some fictional examples:
user/AyberkY/improve-lsm9ds1-spi-latency
feature/create-mcu-state-estimation-thread
bug/gps-thread-deadlock-fix
general/create-new-directory-for-gnc
misc/testing-sd-card-bandwidth
Please include the Trello ticket ID when relevant! i.e. for a ticket [AV-69] your branch might look like:
user/AyberkY/AV-69-graceful-failure-for-fifo-buffer
or
feature/AV-69-create-data-logger-class
We should try to keep an archive of the version of code that ran on each rocket launch, so that we can associate the data we collected with the code that was running on TARS.
After every launch or major milestone, create branch with the following convention:
archive/<month.day.year>-<milestone-or-launch-description>
For example: archive/09.01.21-start-of-2022-school-year
The repository now has a GitHub Actions instance that will automatically check for code style violations!
The Actions instance will not inhibit a pull-request from merging. It is merely there to encourage style consistency throughout our code base.
There is also an auto formatting script that will format your code for you! (its beautiful, you should use it) This means that you don't have to worry about coding to meet the style yourself, as you can simply run the formatting script before you commit/push your changes.
You can run the script on Linux, Mac, or WSL like so:
./run_clang_format.py -i -r .
Things to keep in mind about code formatting:
- The code style being used is defined in
.clang-format. It currently follows Google's C++ style guide exactly. However, a modification was made so that the maximum characters per line was increased from 80 to 120. - Third party libraries (e.g.
ChRtwhich is ChibiOS) are exempted from code-style checks and the auto formatting script. This is to avoid any possibility of breaking proven/working libraries. If adding a new library to flight code, make sure to update.clang-format-ignorewith the relevant file path if it isn't inlib.- Exempt directories should be listed in
.clang-format-ignoreso they don't get auto-formatted by the script. - Exempt directories should also be listed in
.github/workflows/clang_format_check.ymlon the lines withexclude:, so they're not checked for style violations by GitHub.
- Exempt directories should be listed in
- Changing/tweaking the style guide is always option! If you have ideas, reach out!



































