| 328P | Motor Driver | Buttons | LED's | Miscellaneous |
|---|---|---|---|---|
| D2 | i2c Multiplexer | |||
| D3 | Right forward | |||
| D4 | CALIB | |||
| D5 | i2c Sensor 5 | |||
| D6 | Right backward | |||
| D7 | Status LED | |||
| D8 | ||||
| D9 | Left backward | |||
| D10 | Left forward | |||
| D11 | Buzzer | |||
| D12 | ||||
| D13 | WS2812B | |||
| A0 | Battery Voltage |
Battery Voltage: https://docs.google.com/spreadsheets/d/1yMOeYrJNpTg3SMe8cQBoHXpgwAv61uAHFVlT2RJjNy4/edit?usp=sharing
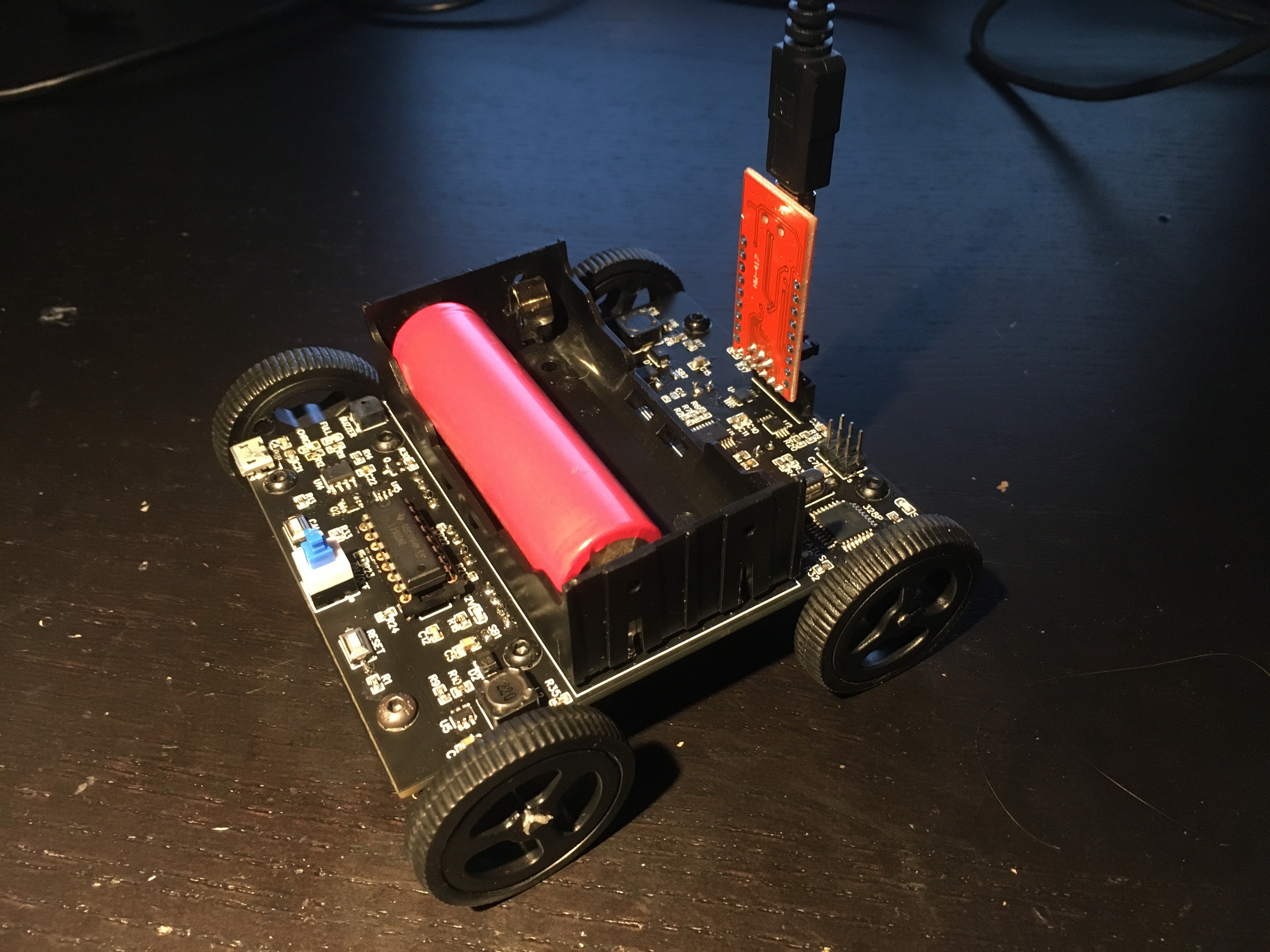
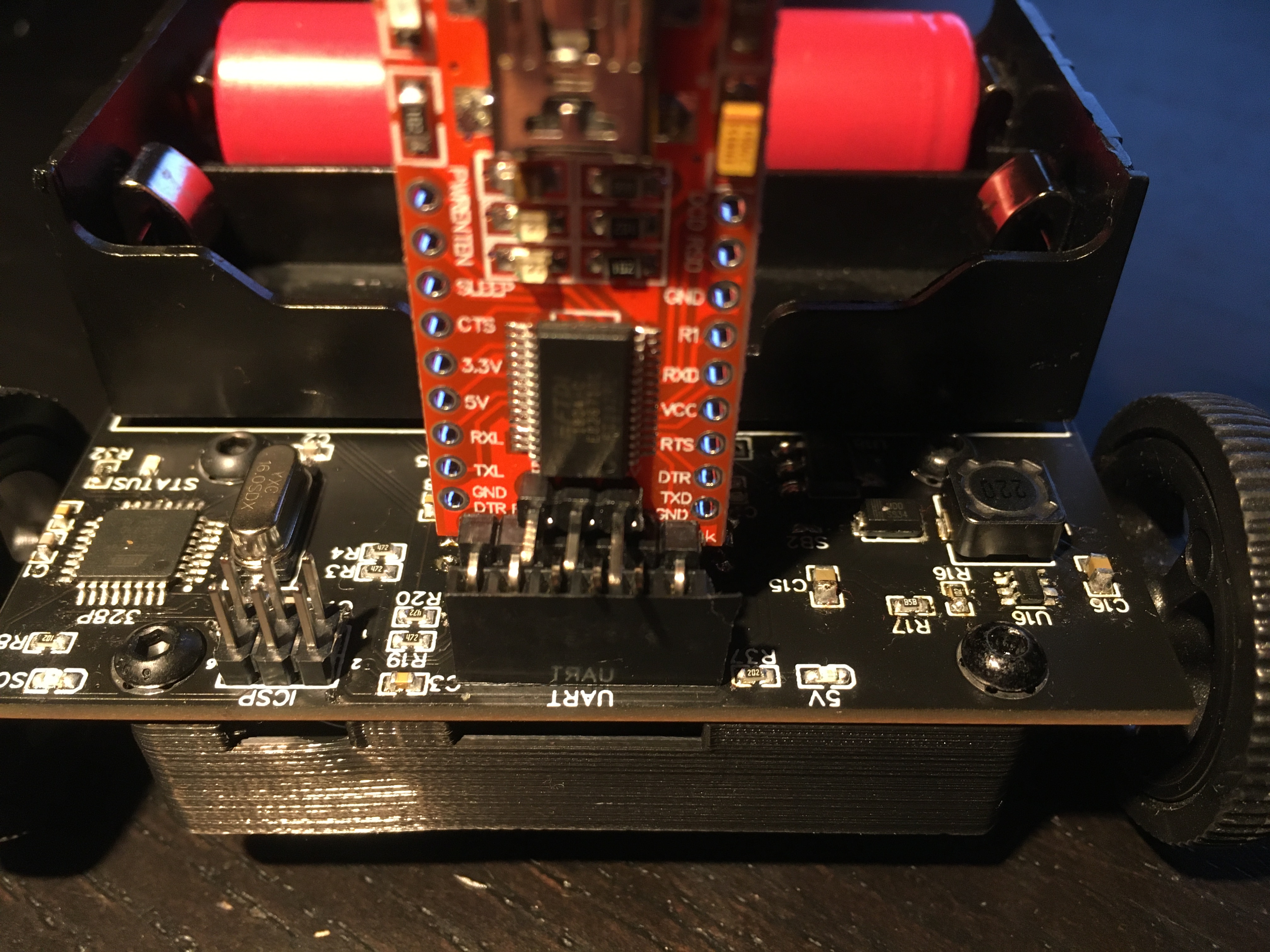
Put the FTDI Chip in the robot like shown in the picture
When Uploading to the robot while it is turned off, please check if the jumper is selected to 5V
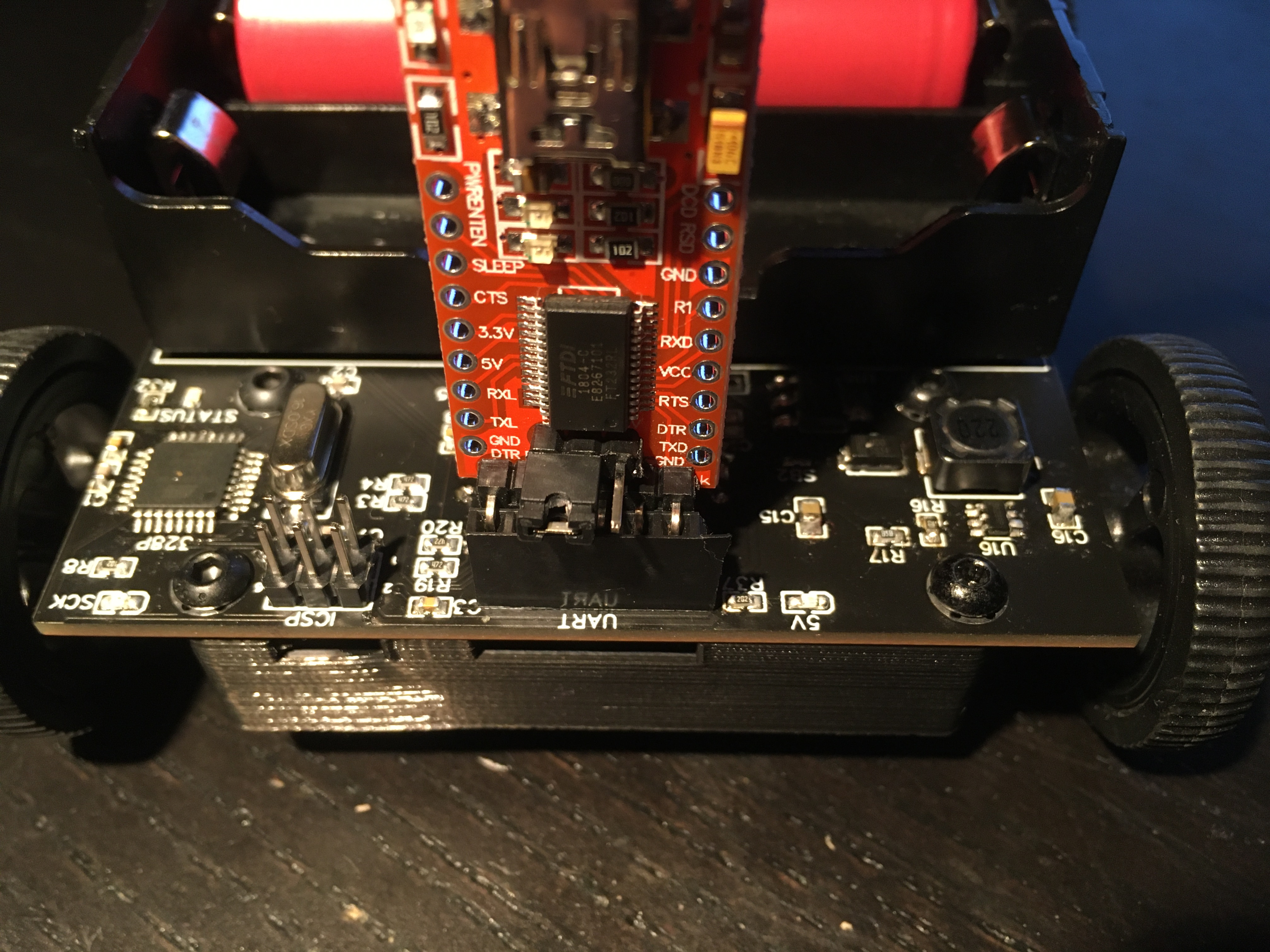
When Uploading to the robot while it is turned on (armed motors), please remove the jumper. Pay attention, the robot may drive itself from your table.
Currently reading the sensor values via Robot::Sensor::refresh() produces somehow
wrong values (the values change according to the surroundings, but are numerically
much worse than in the last commit).
My hunch says me, that this is a problem of the "force mode" of the VEML6040.
I fixed the code, so that everyting LOOKS correct to me.
Relevant funtions are in lib/robot/src/sensor.cpp (refresh and read_color).

