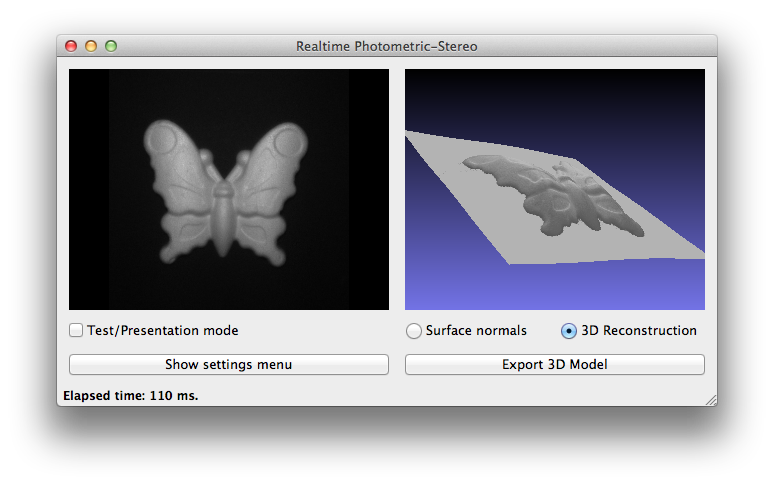
Implementing realtime photometric-stereo using a monochromatic Point Grey Chameleon camera and 8 leds. The camera runs at 15 frames/s with a resolution of 640x480. One reconstruction takes about 100 ms.
gellston / realtime-photometric-stereo Goto Github PK
View Code? Open in Web Editor NEWThis project forked from newproggie/realtime-photometric-stereo
Implementing realtime photometric-stereo using a monochromatic Point Grey Chameleon camera and 8 leds.
License: MIT License