An architecture to control a RC car with ROS.
- NodeMCU ESP8266-12E
- USB Type-A to Micro-B Cable
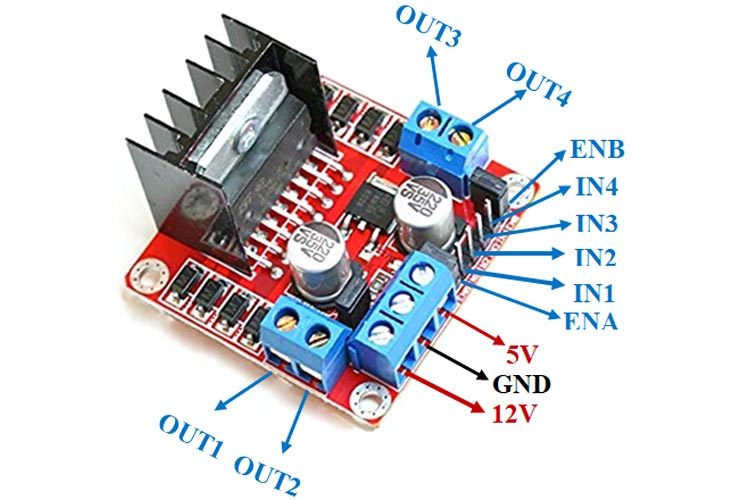
- L298N - motor driver
- Micro USB cable, 9V battery, breadboard (For testing).
- ROS-noetic installed(Ubuntu 20.04)
- For installation of ROS-noetic refer to this wiki ros official page http://wiki.ros.org/noetic/Installation/Ubuntu
- Arduino IDE & esp8266 libraries
- For downloading Arduino IDE and configuring with the esp-12e board libraries you can visit this page https://www.embedded-robotics.com/programming-esp8266/
- xacro installed
- Install using
sudo apt install ros-noetic-xacro


Till now we are able to send and receive messages wirelessly to our laptop on which rosmaster is running with wifi module of the esp-12e.(To see the process check the comments in ./esp12_files/rc_temp.ino)