-
In this study, the materials coming from the conveyor line will be taken from the conveyor line by using a delta robot arm and placed in the desired position as required by the process.
-
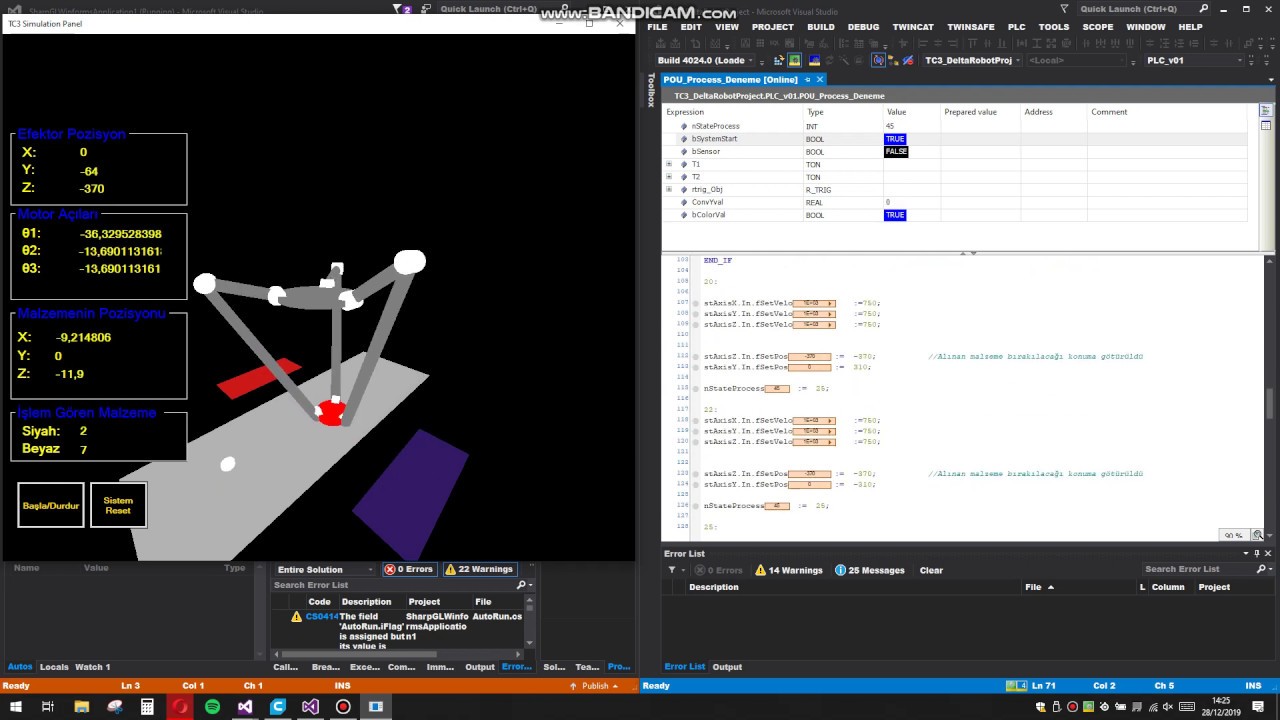
A software was implemented to perform the 3D simulation of this system. Thus, the real-time movements of the system are followed by the user through this simulation program.
"OpenGL_Deneme" in this file you can find C# Codes for the simulation also you can find TwinCAT codes in "TC3_deltarobotprojects" file.
The kinematic calculations of the delta robot arm to be simulated in the project will be calculated with the function blocks in the TwinCAT3 program.
Thus, the X, Y, Z coordinates that the delta robot arm will move during the operation of the conveyor system developed in the TwinCAT3 program will be obtained as a result of the mathematical operation that is solved within these blocks.
In order to calculate kinematics with TwinCAT, it is necessary to specify the type of system to be used.
The delta robot arm to be used is seen as "Delta Type 1" when the documents prepared by Beckhoff company about kinematic motion are examined. (You can reach the kinematic transformations guide prepared by Beckhoff company here.)

When the values specified in the figure above (Inner arm length, Outer arm length, etc.) are adapted to the TwinCAT, the system will be ready for kinematic calculations.
The function block FB_KinConfigGroup configures axes according to the kinematic transformation. These are axes for the ACS (joint) and the MCS (Cartesian). The function block takes the ACS and MCS axes defined in the stAxesList and configures them in the kinematic group of stKinRefIn.

VAR
io_X : AXIS_REF;
io_Y : AXIS_REF;
io_Z : AXIS_REF;
io_M1 : AXIS_REF;
io_M2 : AXIS_REF;
io_M3 : AXIS_REF;
in_stKinToPlc AT %I* : NCTOPLC_NCICHANNEL_REF;
fbConfigKinGroup : FB_KinConfigGroup;
stAxesConfig : ST_KinAxes;
bAllAxesReady : BOOL;
bExecuteConfigKinGroup: BOOL;
bUserConfigKinGroup : BOOL;
bUserCartesianMode : BOOL := TRUE;
(*true: cartesian mode - false: direct mode (without transformation) *)
END_VAR(* read the IDs from the cyclic axis interface so the axes can mapped later to the kinematic group
*)
stAxesConfig.nAxisIdsAcs[1] := io_M1.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[2] := io_M2.NcToPlc.AxisId;
stAxesConfig.nAxisIdsAcs[3] := io_M3.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[1] := io_X.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[2] := io_Y.NcToPlc.AxisId;
stAxesConfig.nAxisIdsMcs[3] := io_Z.NcToPlc.AxisId;
IF bAllAxesReady AND bUserConfigKinGroup THEN
bExecuteConfigKinGroup := TRUE;
ELSE
bExecuteConfigKinGroup := FALSE;
END_IF
fbConfigKinGroup(
bExecute := bExecuteConfigKinGroup ,
bCartesianMode := bUserCartesianMode ,
stAxesList := stAxesConfig,
stKinRefIn := in_stKinToPlc );
The ACS axes must be enabled through MC_Power, to ensure that the state can reach the value KinStatus_Ready. If the ACS axes are not enabled, enable the axes and then call up FB_KinConfigGroup or FB_KinResetGroup.
-
In the designed scenario; 2 different types of material coming over a conveyor line will be sent at random locations on the conveyor.
-
When the materials reach the position where DRA (Delta Robot Arm) will intervene, the location and type information of this material is sent from C # to TwinCAT3. (Communication between C # and TwinCAT in the system is provided by ADS protocol.)
-
Assisted to this information, in which box the material will go is selected in TwinCAT3.
-
The material is taken to the position of the specified box and during this process, kinematic calculations of DRA are calculated in TwinCAT3.
-
The necessary motor angles are calculated for the DRA to move to the selected position.
-
The values calculated as a result of the kinematic operations are sent from TwinCAT to C# to enable the motion in the simulation.
-
When the processes are completed, information is given about the new material coming from TwinCAT to C# and the new material moves on the conveyor in 3D simulation.
You can find the flow diagram of the system below.