beamng / beamng-ros-integration Goto Github PK
View Code? Open in Web Editor NEWHome Page: https://beamng.tech
License: MIT License
Home Page: https://beamng.tech
License: MIT License
ubuntu@DESKTOP-PUKHVO6:~$ rostopic pub /beamng_control/step/goal beamng_msgs/StepActionGoal "header:
seq: 0 stamp: secs: 0 nsecs: 0 frame_id: ''goal_id:
stamp:
secs: 0
nsecs: 0
id: ''
goal:
total_number_of_steps: 50
feedback_cycle_size: 15"
/usr/lib/python3/dist-packages/rostopic/init.py:1782: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details.
pub_args.append(yaml.load(arg))
ubuntu@DESKTOP-PUKHVO6:~$ rosservice call /beamng_control/spawn_vehicle 'ros' [10,15,10] [0,0,0,1] "/config/vehicles/etk800.json"
/usr/lib/python3/dist-packages/rosservice/init.py:607: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details.
service_args.append(yaml.load(arg))
ERROR: service [/beamng_control/spawn_vehicle] responded with an error: b"error processing request: The Lidar sensor definition is missing one or more fields. These fields where defined:\n{'vertical_resolution': 32, 'vertical_angle': 26.9, 'rps': 2200000, 'hz': 20, 'angle': 360, 'max_distance': 10, 'direction': [0, -1, 0], 'position': [0, 0, 1.7], 'axis': [0, -1, 0]}\nOriginal error message:\nCould not get Lidar instance, the json specification provided anunexpected input. List of possibleunexpected inputs:\n{'rps': 2200000, 'hz': 20, 'angle': 360, 'axis': [0, -1, 0], 'visualized': False}\nOriginal error message:\n__init__() got an unexpected keyword argument 'axis'"
fix sensors' attaching to vehicle
I have downloaded this package and catkin_make it in wsl2. But I can't find example.launch in beamng_control. Instead, I tried to launch control.launch. And I got this error Message:

I am running beamng on a windows 11 box and connecting to it across ethernet from my ubuntu 20.04 box.
Env details:
Python==3.7.13
Beamngpy==1.26
Beamng ros integration==0.1.3
Beamngtech==0.28.2.0
I can successfully run and visualize with rviz the default beamn_control example launch. However, when I try and use LiDAR or cameras I am unable to successfully launch a the scenario with sensors from ROS.
Digging into the code it looks like the definitions used in the sensor getters are different to the ones in the beamngpy api.
Take lidar for example
class Lidar:
"""
An interactive, automated LiDAR sensor, which produces regular LiDAR point clouds, ready for further processing.
This sensor can be attached to a vehicle, or can be fixed to a position in space. The dir and up parameters are used to set the local coordinate system.
A requested update rate can be provided, to tell the simulator how often to read measurements for this sensor. If a negative value is provided, the sensor
will not update automatically at all. However, ad-hoc polling requests can be sent at any time, even for non-updating sensors.
Args:
name: A unique name for this LiDAR sensor.
bng: The BeamNGpy instance, with which to communicate to the simulation.
vehicle: The vehicle to which this sensor should be attached, if any.
requested_update_time: The time which should pass between sensor reading updates, in seconds. This is just a suggestion to the manager.
update_priority: The priority which the sensor should ask for new readings. lowest -> 0, highest -> 1.
pos: (X, Y, Z) coordinate triplet specifying the position of the sensor, in world space.
dir: (X, Y, Z) Coordinate triplet specifying the forward direction of the sensor.
up: (X, Y, Z) Coordinate triplet specifying the up direction of the sensor.
vertical_resolution: The vertical resolution of this LiDAR sensor.
vertical_angle: The vertical angle of this LiDAR sensor, in degrees.
rays_per_second: The number of LiDAR rays per second which this sensor should emit.
frequency: The frequency of this LiDAR sensor.
horizontal_angle: The horizontal angle of this LiDAR sensor.
max_distance: The maximum distance which this LiDAR sensor will detect, in metres.
is_using_shared_memory: A flag which indicates if we should use shared memory to send/recieve the sensor readings data.
is_visualised: A flag which indicates if this LiDAR sensor should appear visualised or not.
is_annotated: A flag which indicates if this LiDAR sensor should return annotation data instead of distance data.
is_static: A flag which indicates whether this sensor should be static (fixed position), or attached to a vehicle.
is_snapping_desired: A flag which indicates whether or not to snap the sensor to the nearest vehicle triangle (not used for static sensors).
is_force_inside_triangle: A flag which indicates if the sensor should be forced inside the nearest vehicle triangle (not used for static sensors).
compared with the getters args
lidar = bng_sensors.Lidar(offset=position,
direction=direction,
vres=vertical_resolution,
vangle=vertical_angle,
max_dist=max_distance,
shmem=False,
**spec)
Many of the args are incorrect for example, 'offset' does not appear in the api but rather 'pos'.
I updated these and tried to run again but got then find that 'bng' and 'name' are missing.
I attempted to hand the bng instance (I think) created in the BeamNGBridge line 38 through to the Lidar and created a dummy name. With this roslaunch is able to run past this getter but now the game instance on my windows box crashes. I have attached the error log here.
843cd52a-4b9a-488b-8cf8-a20cbe72d39a.zip
I have not attempted to patch the cameras or extensively tested other sensors at this stage.
I am curious how I can use these sensors when there seems to be a mismatch?
ubuntu_20@DESKTOP-HKDK1FO:~/catkin_ws$ roslaunch beamng_agent example.launch
... logging to /home/ubuntu_20/.ros/log/f5ac04d6-5549-11ec-a125-00155d7eb7cc/roslaunch-DESKTOP-HKDK1FO-25213.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:35383/
PARAMETERS
NODES
/
control (beamng_agent/control.py)
auto-starting new master
process[master]: started with pid [25221]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to f5ac04d6-5549-11ec-a125-00155d7eb7cc
process[rosout-1]: started with pid [25231]
started core service [/rosout]
process[control-2]: started with pid [25234]
Traceback (most recent call last):
File "/home/ubuntu_20/catkin_ws/devel/lib/beamng_agent/control.py", line 15, in
exec(compile(fh.read(), python_script, 'exec'), context)
File "/home/ubuntu_20/catkin_ws/src/beamng-ros-integration/beamng_agent/scripts/control.py", line 82, in
main()
File "/home/ubuntu_20/catkin_ws/src/beamng-ros-integration/beamng_agent/scripts/control.py", line 75, in main
VehicleControl(argv[1])
File "/home/ubuntu_20/catkin_ws/src/beamng-ros-integration/beamng_agent/scripts/control.py", line 19, in init
params = rospy.get_param("beamng")
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/client.py", line 467, in get_param
return _param_server[param_name] #MasterProxy does all the magic for us
File "/opt/ros/noetic/lib/python3/dist-packages/rospy/msproxy.py", line 123, in getitem
raise KeyError(key)
KeyError: 'beamng'
[control-2] process has died [pid 25234, exit code 1, cmd /home/ubuntu_20/catkin_ws/devel/lib/beamng_agent/control.py ego_vehicle __name:=control __log:=/home/ubuntu_20/.ros/log/f5ac04d6-5549-11ec-a125-00155d7eb7cc/control-2.log].
log file: /home/ubuntu_20/.ros/log/f5ac04d6-5549-11ec-a125-00155d7eb7cc/control-2*.log
^C[rosout-1] killing on exit
^C[master] killing on exit
^Cshutting down processing monitor...
... shutting down processing monitor complete
done
i was testing the bridge package be running catkin_make run_tests_beamng_control, the result as shown below
`
ubuntu@DESKTOP-PUKHVO6:~/catkin_ws$ catkin_make run_tests_beamng_control
Base path: /home/ubuntu/catkin_ws
Source space: /home/ubuntu/catkin_ws/src
Build space: /home/ubuntu/catkin_ws/build
Devel space: /home/ubuntu/catkin_ws/devel
Install space: /home/ubuntu/catkin_ws/install
[ROSTEST]-----------------------------------------------------------------------
[testtest_topics][failed]
SUMMARY
ERROR: The following tests failed to run:
rostest log file is in /home/ubuntu/.ros/log/rostest-DESKTOP-PUKHVO6-665.log
[ROSTEST]-----------------------------------------------------------------------
[testtest_services][failed]
SUMMARY
ERROR: The following tests failed to run:
rostest log file is in /home/ubuntu/.ros/log/rostest-DESKTOP-PUKHVO6-667.log
-- run_tests.py: verify result "/home/ubuntu/catkin_ws/build/test_results/beamng_control/rostest-test_topics.xml"
-- run_tests.py: verify result "/home/ubuntu/catkin_ws/build/test_results/beamng_control/rostest-test_services.xml"
Built target run_tests_beamng_control_rostest_test_services.test
Built target run_tests_beamng_control_rostest_test_topics.test
Built target run_tests_beamng_control_rostest
Built target run_tests_beamng_control`
i used rqt topics monitoring to see if there is any activity in the topics, but as shown below, no messages are transferred
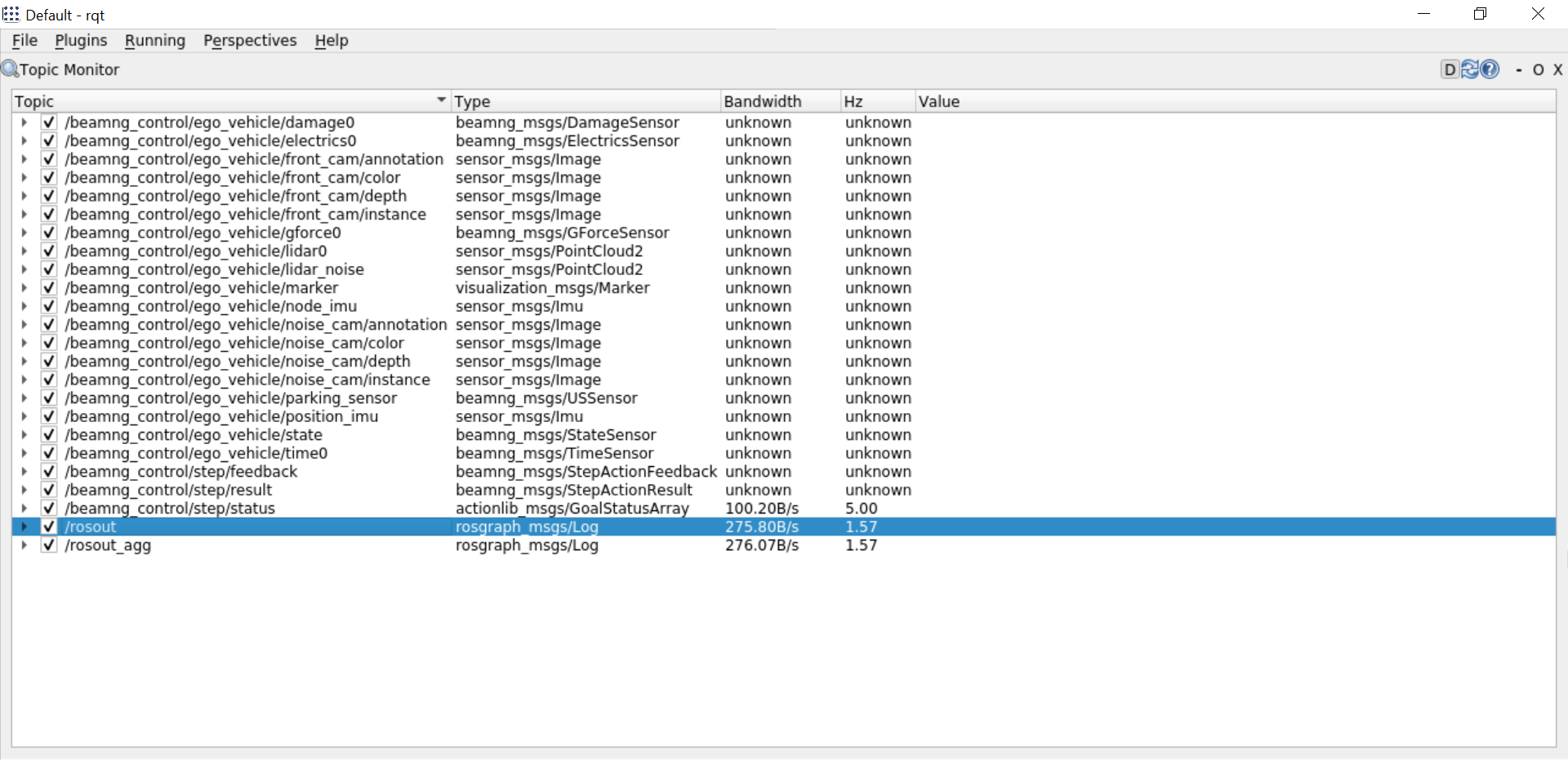
)
i loaded a scenario using Beamng_control example.launch, but the scnerio doen't start, so i have to manually click on start button of BeamNG.Drive game, After that the vehicle don't move by keyboard keys, so i have to press CTR+R to reload the vehicle
i used the following script to load the BeamNG.Drive Game
import time
from beamngpy import BeamNGpy, Scenario, Vehicle
bng = BeamNGpy('localhost', 64256)
bng.open()
while True:
time.sleep(5)
then BeamNG.Drive consol shows the followng error :
000.247|I|Paths|User path: C:\Users\USER\AppData\Local\BeamNG.drive\
000.978|I|SFXFMODProvider::init|SFXFMODProvider - FMOD API version: 2.1.16
002.125|I|SFXSystem::initChannels|SFXSystem initChannels called.....
002.216|I|SFXFMODDevice::_init|SFXFMODDevice::_init() - Setting max Vorbis codecs to 32
002.217|I|SFXFMODDevice::_init|SFXFMODDevice::_init() - Setting max FADPCM codecs to 32
002.218|I|SFXFMODDevice::_init|SFXFMODDevice::_init() - Setting idle sample pool size to 384MB
002.305|I|GELua.|============== Game Engine Lua VM started ==============
002.478|I|GELua.core_activityManager.|Loaded 11 condition types from 3 files.
002.489|I|GELua.gameplay_missions_missions.|Loaded 2 procedural Mission Generators from 2 files.
002.494|I|Paths|User path: C:\Users\USER\AppData\Local\BeamNG.drive\
007.264|I|GELua.pri143.409|I|GELua.util_researchGE.ResearchGE|Accepted new client: 10.140.0.27/64256
143.742|I|GELua.util_researchGE.ResearchGE|Loading scenario: /levels/GridMap/scenarios/test.json
143.905|I|GELua.util_researchGE.ResearchGE|Scenario found...
144.652|I|GELua.levelLoading|*** loading level: levels/gridmap/info.json
144.654|I|GELua.levelLoading|*** Loading init took: 0.185 s
146.066|I|GELua.levelLoading|*** Loaded datablocks in 1.411 s
146.347|I|GELua.levelLoading|*** Loaded materials in 0.282 s
146.350|I|LoadingManager|starting to load objects. Displaying items above 10 ms
146.499|I|LoadingManager::loadLevelJsonObjects|* loading json took 0.147 s
146.501|I|LoadingManager::loadLevelJsonObjects|* ordering json took 0.002 s
146.503|I|LoadingManager| ===== Base ===================================
146.575|I|LoadingManager| LevelInfo [1 ] in 0.070 s | 0.070 s/item
146.609|I|LoadingManager| CameraBookmark [11 ] in 0.013 s | 0.001 s/item
146.612|I|LoadingManager| total 0.107 s
146.614|I|LoadingManager| ===== Terrain ===================================
147.177|I|LoadingManager| TerrainBlock [1 ] in 0.561 s | 0.561 s/item
147.179|I|LoadingManager| total 0.563 s
147.180|I|LoadingManager| ===== Environment ===================================
147.247|I|LoadingManager| CloudLayer [2 ] in 0.066 s | 0.033 s/item
147.275|I|LoadingManager| ScatterSky [1 ] in 0.026 s | 0.026 s/item
147.369|I|LoadingManager| WaterBlock [5 ] in 0.091 s | 0.018 s/item
147.561|I|LoadingManager| GroundCover [2 ] in 0.188 s | 0.094 s/item
147.564|I|LoadingManager| total 0.382 s
147.565|I|LoadingManager| ===== Forest ===================================
147.877|I|Forest::reloadData|Read 2538 forest items split into 32 different types
149.799|I|LoadingManager| Forest [1 ] in 2.232 s | 2.232 s/item
149.801|I|LoadingManager| total 2.234 s
149.803|I|LoadingManager| ===== Meshes ===================================
151.790|I|LoadingManager| TSStatic [867 ] in 1.986 s | 0.002 s/item
151.793|I|LoadingManager| total 1.989 s
151.794|I|LoadingManager| ===== Prefabs ===================================
151.796|I|LoadingManager| total 0.000 s
151.797|I|LoadingManager| ===== Roads ===================================
151.990|I|LoadingManager| DecalRoad [75 ] in 0.191 s | 0.003 s/item
151.994|I|LoadingManager| total 0.196 s
151.997|I|LoadingManager| ===== Audio ===================================
151.999|I|LoadingManager| total 0.000 s
152.001|I|LoadingManager| ===== Other ===================================
152.003|I|LoadingManager| total 0.001 s
152.773|I|SceneStaticManagerRender::_onObjectsReady|*** Built static data in 0.766s
152.775|I|LoadingManager::loadLevelJsonObjects|* loading took 6.274 s
152.781|I|GELua.levelLoading|*** Level loaded: /levels/gridmap/info.json
152.782|I|GELua.levelLoading|*** Loaded objects in 6.434 s
152.785|I|GELua.levelLoading|*** Loaded ai.map in 0.003 s
152.818|I|GELua.levelLoading|*** Loaded decals in 0.033 s
152.820|I|BeamNGPhysicsPlugin::enableSimulation|RELOADING COLLISION
152.897|I|BeamNGPhysicsPlugin::reload|*** generated physics collision in 0.076s
152.955|I|libbeamng.engine.staticCollision|*** Loaded Static Collision, containing 270591 tris, in 0.053 s
152.959|I|BeamNGPhysicsPlugin::reload|*** reloaded physics in 0.138s
152.961|I|GELua.levelLoading|*** Started physics in 0.143 s
152.974|I|GELua.levelLoading|*** Loaded player and camera in 0.013 s
153.007|E|translate|unable to find translation for key 'test'. Default: 'test'
153.011|W|ConsoleTypeTypeColorF::setData|TypeColorF() - Invalid single argument of 'None' could not be interpreted as a stock color name. Using default.
153.014|W|StockColor::colorF|Could not find stock color name 'None', defaulting to 'White'
153.016|W|ConsoleTypeTypeColorF::setData|TypeColorF() - Invalid single argument of 'None' could not be interpreted as a stock color name. Using default.
153.018|W|StockColor::colorF|Could not find stock color name 'None', defaulting to 'White'
153.021|W|ConsoleTypeTypeColorF::setData|TypeColorF() - Invalid single argument of 'None' could not be interpreted as a stock color name. Using default.
153.023|W|StockColor::colorF|Could not find stock color name 'None', defaulting to 'White'
153.029|I|BeamNGVehicle::spawnObject|Spawning object 'etk800' with default config
169.139|E|GELua.scenario_scenarios.scenarios|Prefab: test already exist in level
169.141|I|BeamNGPhysicsPlugin::enableSimulation|RELOADING COLLISION
169.238|I|BeamNGPhysicsPlugin::reload|*** generated physics collision in 0.095s
169.240|I|BeamNGPhysicsPlugin::reload|*** reloaded physics in 0.097s
169.409|I|GELua.levelLoading|*** Loaded everything in 24.941 s
169.489|I|libbeamng.engine.staticCollision|*** Loaded Static Collision, containing 270591 tris, in 0.041 s
171.999|I|GELua.gameplay_missions_missions.|Loaded 200 total missions: 58 from files, 142 from generators.
174.170|I|GELua.main|Player #0 vehicle switched from: nil to: id 9011 (/vehicles/etk800/)
188.439|I|GELua.scenario_waypoints.waypoints|initialise called....
188.459|I|GELua.scenario_waypoints.waypoints|No lapconfig found or lapconfig empty. Not initializing waypoints system
189.112|I|GELua.util_researchGE.ResearchGE|New vehicle connection: 9011, 54632
189.195|E|GameEngineLua:Exception|/lua/common/luaBinding.lua:51: bad argument #1 to 'rawget' (table expected, got nil)
=============== Stack Traceback >> START >>
(1) C function 'function: 0x01b1b459b6a8'
(2) global C function 'rawget'
(3) Lua metamethod '__index' at file '/lua/common/luaBinding.lua:51'
Local variables:
t = table: 0x01b1ea7caf80 {__index:function: 0x01b1e9ffae68, __newindex:function: 0x01b1e9ffaec8, getStaticColDebugEnabled:function: 0x01b1ea7d79e8 (more...)}
k = string: "Annotation"
mt = table: 0x01b1ea7caf80 {__index:function: 0x01b1e9ffae68, __newindex:function: 0x01b1e9ffaec8, getStaticColDebugEnabled:function: 0x01b1ea7d79e8 (more...)}
res = nil
origgetters = nil
(4) Lua local 'handler' at line 833 of chunk 'lua/ge/extensions//util/researchGE.lua'
Local variables:
skt = tcp{client}: 000001B1A955E0A0
msg = table: 0x01b1c7e98bf8 {type:EngineFlags, flags:table: 0x01b1c7e98998}
flags = table: 0x01b1c7e98998 {lidar:true, annotations:true}
(*temporary) = table: 0x01b1ea7caf80 {__index:function: 0x01b1e9ffae68, __newindex:function: 0x01b1e9ffaec8, getStaticColDebugEnabled:function: 0x01b1ea7d79e8 (more...)}
(*temporary) = table: 0x01b1c7e98bf8 {type:EngineFlags, flags:table: 0x01b1c7e98998}
(*temporary) = number: 3
(*temporary) = number: 2
(*temporary) = number: 6.95141e-310
(*temporary) = number: 9.2077e-312
(5) Lua field 'checkMessages' at line 113 of chunk 'lua/common/utils/researchCommunication.lua'
Local variables:
E = table: 0x01b1a41a1720 {handleCreateCube:function: 0x01b1eb07e470, notifyUI:function: 0x01b1eae43920 (more...)}
clients = table: 0x01b1a9792858 {1:tcp{client}: 000001B1A97E2368, 2:tcp{client}: 000001B1A955E0A0}
message = table: 0x01b1c7e98bf8 {type:EngineFlags, flags:table: 0x01b1c7e98998}
err = nil
readable = table: 0x01b1c56b8eb8 {1:tcp{client}: 000001B1A955E0A0, tcp{client}: 000001B1A955E0A0:1}
writable = table: 0x01b1c5990698 {1:tcp{client}: 000001B1A97E2368, 2:tcp{client}: 000001B1A955E0A0, tcp{client}: 000001B1A97E2368:1 (more...)}
error = nil
ret = boolean: true
(for index) = number: 1
(for limit) = number: 1
(for step) = number: 1
i = number: 1
skt = tcp{client}: 000001B1A955E0A0
msgType = string: "handleEngineFlags"
handler = Lua function '?' (defined at line 830 of chunk lua/ge/extensions//util/researchGE.lua)
(6) Lua local 'func' at line 163 of chunk 'lua/ge/extensions//util/researchGE.lua'
Local variables:
dt = number: 0.434086
obsoleteFuncIndices = table: 0x01b1b7cc0478 {}
(7) Lua field 'hook' at line 654 of chunk 'lua/common/extensions.lua'
Local variables:
funcName = string: "onPreRender"
funcList = table: 0x01b1d43fad50 {1:function: 0x01b1ead05b58, 2:function: 0x01b1eafb4338, 3:function: 0x01b1ead94908 (more...)}
(for generator) = C function: builtin#6
(for state) = table: 0x01b1d43fad50 {1:function: 0x01b1ead05b58, 2:function: 0x01b1eafb4338, 3:function: 0x01b1ead94908 (more...)}
(for control) = number: 1
_ = number: 1
func = Lua function '?' (defined at line 102 of chunk lua/ge/extensions//util/researchGE.lua)
(8) Lua function 'luaPreRender' at file '/lua/ge/main.lua:302' (best guess)
Local variables:
dtReal = number: 0.434086
dtSim = number: 0.05
dtRaw = number: 0.0921748
updateUIData = boolean: true
--------------- << END <<
<img width="960" alt="BNG_not_working" src="https://user-images.githubusercontent.com/94268081/149770630-67f1a570-b496-4724-aabe-d75cb8cb4224.PNG">
windows machine :
Edition Windows 11 Home Insider Preview Single Language
Version Dev
Installed on 19/11/2021
OS build 22504.1010
Experience Windows Feature Experience Pack 1000.22504.1010.0
WSL2:
DISTRIB_ID=Ubuntu
DISTRIB_RELEASE=20.04
DISTRIB_CODENAME=focal
DISTRIB_DESCRIPTION="Ubuntu 20.04.3 LTS"
`ubuntu_20@DESKTOP-HKDK1FO:~/catkin_ws/src/beamng-ros-integration/beamng_control/launch$ roslaunch example.launch
... logging to /home/ubuntu_20/.ros/log/14bd33ec-51f1-11ec-9096-00155ded229e/roslaunch-DESKTOP-HKDK1FO-219.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://localhost:44479/
PARAMETERS
NODES
/
beamng_control (beamng_control/bridge.py)
ROS_MASTER_URI=http://localhost:11311
process[beamng_control-1]: started with pid [233]
2021-11-30 23:24:16,695 |INFO |beamngpy |Started BeamNGpy logging.
2021-11-30 23:24:16,696 |WARNING |py.warnings |/home/ubuntu_20/.local/lib/python3.8/site-packages/beamngpy/beamng.py:69: DeprecationWarning: The use of beamng.setup_logging is deprecated and will be removed in future versions. Use beamngcommon.set_up_simple_logging or beamngcommon.config_logging instead.
create_warning(warn_msg, DeprecationWarning)
2021-11-30 23:24:16,696 |WARNING |py.warnings |/home/ubuntu_20/.local/lib/python3.8/site-packages/beamngpy/beamng.py:69: DeprecationWarning: The use of beamng.setup_logging is deprecated and will be removed in future versions. Use beamngcommon.set_up_simple_logging or beamngcommon.config_logging instead.
create_warning(warn_msg, DeprecationWarning)
2021-11-30 23:24:16,696 |INFO |rosout |cmd args['/home/ubuntu_20/catkin_ws/devel/lib/beamng_control/bridge.py', '/home/ubuntu_20/catkin_ws/src/beamng-ros-integration/beamng_control/config/scenarios/simple_scenario.json']
2021-11-30 23:24:16,699 |INFO |beamngpy.BeamNGpy |Opening BeamNGpy instance.
2021-11-30 23:24:16,700 |INFO |beamngpy.BeamNGpy |Connecting to BeamNG.tech at: (192.168.0.113, 64255)
2021-11-30 23:24:16,932 |INFO |rospy.internal |topic[/rosout] adding connection to [/rosout], count 0
[FATAL] [1638285990.579056]: Could not establish connection, check whether BeamNG.tech is running.
2021-11-30 23:26:30,578 |CRITICAL |rosout |Could not establish connection, check whether BeamNG.tech is running.
2021-11-30 23:26:30,582 |WARNING |py.warnings |sys:1: ResourceWarning: unclosed <socket.socket fd=10, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.30.153.206', 53498)>
2021-11-30 23:26:30,582 |WARNING |py.warnings |sys:1: ResourceWarning: unclosed <socket.socket fd=10, family=AddressFamily.AF_INET, type=SocketKind.SOCK_STREAM, proto=0, laddr=('172.30.153.206', 53498)>
2021-11-30 23:26:30,582 |INFO |rospy.core |signal_shutdown [atexit]
2021-11-30 23:26:30,584 |INFO |rospy.internal |topic[/rosout] removing connection to /rosout
2021-11-30 23:26:30,585 |INFO |rospy.impl.masterslave |atexit
[beamng_control-1] process has died [pid 233, exit code 1, cmd /home/ubuntu_20/catkin_ws/devel/lib/beamng_control/bridge.py /home/ubuntu_20/catkin_ws/src/beamng-ros-integration/beamng_control/config/scenarios/simple_scenario.json __name:=beamng_control __log:=/home/ubuntu_20/.ros/log/14bd33ec-51f1-11ec-9096-00155ded229e/beamng_control-1.log].
log file: /home/ubuntu_20/.ros/log/14bd33ec-51f1-11ec-9096-00155ded229e/beamng_control-1*.log
all processes on machine have died, roslaunch will exit
shutting down processing monitor...
... shutting down processing monitor complete
done`
A declarative, efficient, and flexible JavaScript library for building user interfaces.
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
An Open Source Machine Learning Framework for Everyone
The Web framework for perfectionists with deadlines.
A PHP framework for web artisans
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
Some thing interesting about web. New door for the world.
A server is a program made to process requests and deliver data to clients.
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
Some thing interesting about visualization, use data art
Some thing interesting about game, make everyone happy.
We are working to build community through open source technology. NB: members must have two-factor auth.
Open source projects and samples from Microsoft.
Google ❤️ Open Source for everyone.
Alibaba Open Source for everyone
Data-Driven Documents codes.
China tencent open source team.