Comments (8)
 hasauino
commented on June 15, 2024
2
hasauino
commented on June 15, 2024
2
Ok great! :thumbsup:
glad it finally worked. I will close this issue now.
thanks for providing this launch file, I think it might be helpful for others running through the same problem
from rrt_exploration.
hasauino
commented on June 15, 2024
Hi chbloca,
I would first check the topic names on which Rviz publishes clicked points, which you use to define the area. The global and local detectors expect the points to be published on /clicked_point. This topic is by default the topic name Rviz publishes any clicked point. Most likely this is not your problem.
The second thing you need to check, whether you visualize Markers on Rviz. The detectors publish Marker messages on /global_detector_shapes and /local_detector_shapes.
I have added a launch file in the rrt_exploration_tutorials package, for launching a robot without name prefix. It uses a Rviz config file to visualize everything correctly. You may need to make changes according to your topic names.
For example, the laser scan topic name of yours is different. You may optionally change it to /base_scan, Or modify the Rviz config file, line 242. (but this is not necessary, only if you wish to visualize the laser scans)
If the problem still persists, can you show me all the topic names when you run your system?
from rrt_exploration.
 christenbc
commented on June 15, 2024
christenbc
commented on June 15, 2024
I just added this line in the launcher I posted:
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rrt_exploration_tutorials)/launch/includes/rviz_config/simple.rviz">
</node>
Now with the RViz running your custom configuration it works! Just the rrt algorithm, but the robot won't move.

Here are the list of topics:


Are the command move orders based on 2D Nav Goal? Because when I try to send orders manually to the robot with 2D Nav Goal, it won't move. Maybe that's the problem. So if I manage to solve this, will it work? Or what might be another problem?
Thanks for your quick answer, Hasauino.
PD: I don't want Gazebo to open, I don't need it.
from rrt_exploration.
hasauino
commented on June 15, 2024
Can you also show me your tf tree, all the frames? and also your rosservice list
Why is the global costmap not showing? in your first picture, Rviz is showing an error or a warning for the global cost map (marked in orange)?
When you publish Nav goal, what topic do you use?
why do you have two actions for the move base, move_base action and relative_move_action?
from rrt_exploration.
christenbc
commented on June 15, 2024
I will try to answer your questions and provide your the rosservice list tomorrow when I have access again to the robot.
Meanwhile, here I provide you the tf tree and the frames.
The second rqt graph is a simplified version of the whole picture with move_base_node filter


frames with launcher.pdf
from rrt_exploration.
christenbc
commented on June 15, 2024
Here is the rosservice list:

The topic used to send Nav goal is: /move_base_simple/goal
move_base action is for the navigation stack
relative_move_action is a feature built-in the robot which provides the posibility of moving it with a virtual joystick as if it was a "rosrun teleop_twist_keyboard teleop_twist_keyboard.py" but smoother.
from rrt_exploration.
hasauino
commented on June 15, 2024
Hi chbloca,
It looks like both the filter and the assigner nodes are not running. I first will list what both of these nodes depend on. Then I will try to expect what your setup is missing.
1-Filter node:
It depends on:
- Global cost maps, which the navigation stack should be publishing.
the cost maps are expected to be published on/move_base_node/global_costmap/costmap. - Map.
2-Assigner node:
it depends on:
- Map.
- tf:
- /base_link to be the robot frame
- a transformation between /map frame to /base_link.
/move_baseaction server. Which is normally run by the navigation stack./move_base_node/NavfnROS/make_plan service. Also run by the navigation stack.
What I think is missing in your setup:
- Global costmap.
are you sure it's being published? if so, is it on the same topic name/move_base_node/global_costmap/costmap? why is it marked orange in Rviz, indicating a warning or error.
If there is no problem with the global costmap, the filter node should be running. The only possible reason why it's not is the global cost map.
-/move_base_node/NavfnROS/make_plan service.
In your rosservice list it was not there. I also don't see other navigation stack services. They are not required though.
- Regarding the
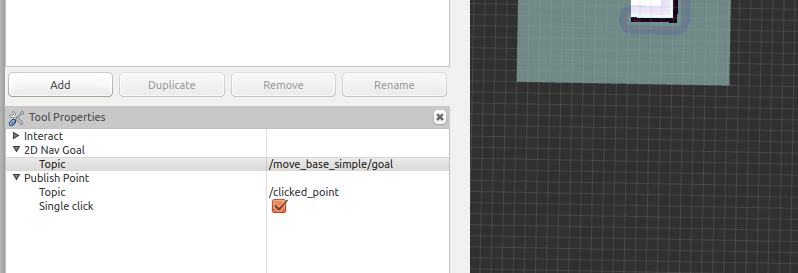
move_baseaction. You said you were not able to send a Nav goal manually. This is strange, since Rviz publishes on the/move_base_simple/goaltopic too. If the move_base action is running correctly, you should be able to send Nav goals. Try to check tool properties of Rviz, and check 2D Nav goal topic if it's set correctly.
from rrt_exploration.
christenbc
commented on June 15, 2024
Ok, problem solved. The problems were that I didn't include the move_base node in the launcher and that the resolution of the gmapping was too high (delta parameter) so it had a tremendous impact laptop which caused lags and TF OLD DATA. Adjusting some parameters I got this launcher which works perfectly.
<launch>
<param name="use_sim_time" value="false" />
<arg name="scan_topic" default="/f_scan" />
<node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen">
<param name="odom_frame" value="odom"/>
<param name="base_frame" value="base_link"/>
<param name="map_frame" value="map"/>
<!-- Process 1 out of every this many scans (set it to a higher number to skip more scans) -->
<param name="throttle_scans" value="1"/>
<param name="map_update_interval" value="2.0"/> <!-- default: 5.0 -->
<!-- The maximum usable range of the laser. A beam is cropped to this value. -->
<param name="maxUrange" value="5.0"/>
<!-- The maximum range of the sensor. If regions with no obstacles within the range of the sensor should appear as free space in the map, set maxUrange < maximum range of the real sensor <= maxRange -->
<param name="maxRange" value="10.0"/>
<param name="sigma" value="0.05"/>
<param name="kernelSize" value="1"/>
<param name="lstep" value="0.05"/>
<param name="astep" value="0.05"/>
<param name="iterations" value="5"/>
<param name="lsigma" value="0.075"/>
<param name="ogain" value="3.0"/>
<param name="minimumScore" value="0.0"/>
<!-- Number of beams to skip in each scan. -->
<param name="lskip" value="0"/>
<param name="srr" value="0.01"/>
<param name="srt" value="0.02"/>
<param name="str" value="0.01"/>
<param name="stt" value="0.02"/>
<!-- Process a scan each time the robot translates this far -->
<param name="linearUpdate" value="0.1"/>
<!-- Process a scan each time the robot rotates this far -->
<param name="angularUpdate" value="0.05"/>
<param name="temporalUpdate" value="0.1"/>
<param name="resampleThreshold" value="0.5"/>
<!-- Number of particles in the filter. default 30 -->
<param name="particles" value="10"/>
<!-- Initial map size -->
<param name="xmin" value="-5.0"/>
<param name="ymin" value="-5.0"/>
<param name="xmax" value="5.0"/>
<param name="ymax" value="5.0"/>
<!-- Processing parameters (resolution of the map) -->
<param name="delta" value="0.1"/>
<param name="llsamplerange" value="0.01"/>
<param name="llsamplestep" value="0.01"/>
<param name="lasamplerange" value="0.005"/>
<param name="lasamplestep" value="0.005"/>
<remap from="scan" to="$(arg scan_topic)"/>
</node>
<arg name="namespace" value=""/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base_node" output="screen">
<param name="footprint_padding" value="0.01" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="3.0" />
<param name="oscillation_timeout" value="30.0" />
<param name="oscillation_distance" value="0.5" />
<param name="planner_patience" value="1" />
<param name="controller_patience" value="1" />
<remap from="cmd_vel" to="mobile_base/commands/velocity"/>
<param name="recovery_behavior_enabled" value="false" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find rrt_exploration_tutorials)/param/local_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/global_costmap_params.yaml" command="load" />
<rosparam file="$(find rrt_exploration_tutorials)/param/base_local_planner_params.yaml" command="load" />
<param name="global_costmap/global_frame" value="$(arg namespace)/map"/>
<param name="global_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="global_costmap/laser_scan_sensor/sensor_frame" value="/$(arg namespace)/base_laser_link"/>
<param name="global_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/$(arg scan_topic)"/>
<param name="local_costmap/global_frame" value="$(arg namespace)/odom"/>
<param name="local_costmap/robot_base_frame" value="$(arg namespace)/base_link"/>
<param name="local_costmap/laser_scan_sensor/sensor_frame" value="$(arg namespace)/front_laser_link"/>
<param name="local_costmap/laser_scan_sensor/topic" value="/$(arg namespace)/$(arg scan_topic)"/>
<param name="local_costmap/obstacle_layer/laser_scan_sensor/topic" value="/$(arg namespace)/$(arg scan_topic)"/>
</node>
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find rrt_exploration_tutorials)/launch/includes/rviz_config/simple.rviz">
</node>
</launch>
Thank you very much Hasauino for your support.
from rrt_exploration.
Related Issues (19)
- Hello, hasauino! I have a weird problem when running this rrt_exploration package. HOT 8
- distance question HOT 3
- Is there any new version for ros-melodic in the future? HOT 1
- Rviz Tf error - map is not displayed- Need to couple Tf frames - basefootprint and map HOT 1
- Filter node: Unable to get filtered points HOT 4
- Hello, I have a issues when I run multi robots exploration. HOT 5
- Cannot locate message [points] in package [geometry_msgs] HOT 1
- rrt run in melodic HOT 2
- Hello, I have a problem when I run multi robots exploration HOT 1
- Can this package be used along with RTAB-Map?
- informationGain return 0 always HOT 2
- Is it possible to use RRT exploration on ROS noetic? HOT 5
- Frontiers not getting detected
- Running on melodic system, gmapping cannot be drawn
- how to save the map after gmapping? HOT 1
- Some doubts about the paper and code HOT 4
- Client [/mir_auto_bagger] wants topic /move_base/goal to have datatype/md5sum HOT 1
- No frontier point is detected HOT 6
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from rrt_exploration.