Comments (3)
 samkys
commented on June 9, 2024
2
samkys
commented on June 9, 2024
2
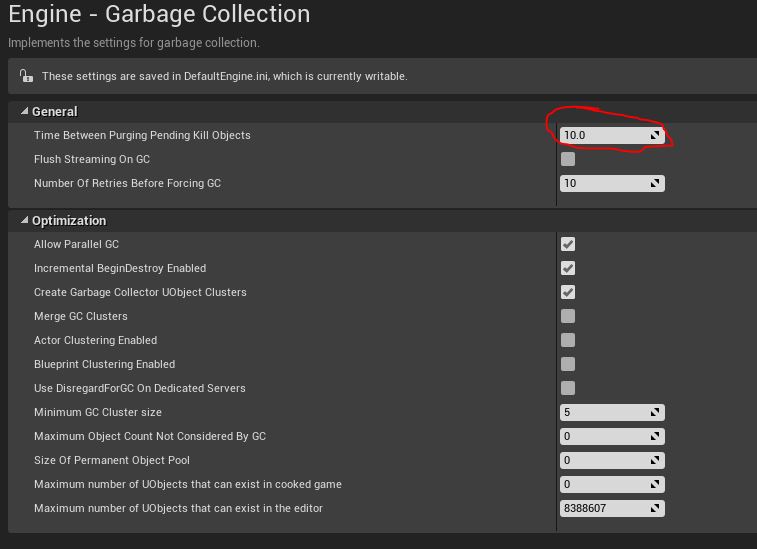
Assuming the time is random like you said this sounds like a garbage collector issue. It's on the UE4 side of things, I believe what happens is that UE4 thinks you are no longer using the pointer so it tries to delete it. For a quick test to see if that is the problem adjust the time like in the image attached.
(To get there, go to edit->project settings then engine->garbage collection change the piece that's circled to something way less and see what that does. Then change it to something way longer and see what that does.
If that solves the problem what you need to do is something like this:
// These need to be property'd so that they don't get garbage collected
// https://github.com/code-iai/ROSIntegration/issues/32
UPROPERTY()
UTopic* topic_;
from rosintegration.
 rkvtmw
commented on June 9, 2024
1
rkvtmw
commented on June 9, 2024
1
I found this issue after experiencing the same symptoms. Somewhere between 10-30s of time running Unreal, I would get an access violation in Topic.h. Adding UPROPERTY() to my member declaration of UTopic seemed to fix it.
from rosintegration.
samkys
commented on June 9, 2024
@p-buddy Any news? Would be great to close this if that was the problem.
from rosintegration.
Related Issues (20)
- Fork with visualizations, websockets, latest rosbridge_suite, etc. HOT 5
- Subsystem Game Instance HOT 3
- PR #180 Gives Compile Error in UE4 HOT 4
- Use of undeclared Identifier GetGameInstance HOT 1
- How can I solve the problem of `sensor_msgs/CameraInfo does not have a field d` HOT 2
- ROS bridge for UE 5 HOT 4
- (UE5 / Humble) De-/serialization problem when trying to publish sensor_msgs/Image or CompressedImage HOT 3
- ROS Message Types as UObjects? HOT 1
- Crashing and lag spikes. HOT 1
- Accessing the variable that was updated from a subscribed topic
- HoloLens2 packaging fails HOT 2
- (UE5/Melodic) Subscribing to color compressedImage and depth Image at the same time HOT 1
- /Clock publish rate too low. HOT 2
- sensor_msgs/Image Issue HOT 2
- After receiving the Service, it will crash when receiving the Topic.
- Trigger implementation issues HOT 2
- { Plugin "ROSIntergration" failed to load } problem HOT 1
- Error: no matching member function for call to 'AddRaw' HOT 1
- ROSBridge Message Error for sensor_msgs/CameraInfo HOT 2
- Failed to build ROSIntegration on UE5 5.3.2 linux HOT 2
Recommend Projects
-
 React
React
A declarative, efficient, and flexible JavaScript library for building user interfaces.
-
Vue.js
🖖 Vue.js is a progressive, incrementally-adoptable JavaScript framework for building UI on the web.
-
 Typescript
Typescript
TypeScript is a superset of JavaScript that compiles to clean JavaScript output.
-
TensorFlow
An Open Source Machine Learning Framework for Everyone
-
Django
The Web framework for perfectionists with deadlines.
-
 Laravel
Laravel
A PHP framework for web artisans
-
D3
Bring data to life with SVG, Canvas and HTML. 📊📈🎉
-
Recommend Topics
-
javascript
JavaScript (JS) is a lightweight interpreted programming language with first-class functions.
-
web
Some thing interesting about web. New door for the world.
-
server
A server is a program made to process requests and deliver data to clients.
-
Machine learning
Machine learning is a way of modeling and interpreting data that allows a piece of software to respond intelligently.
-
Visualization
Some thing interesting about visualization, use data art
-
Game
Some thing interesting about game, make everyone happy.
Recommend Org
-
Facebook
We are working to build community through open source technology. NB: members must have two-factor auth.
-
Microsoft
Open source projects and samples from Microsoft.
-
Google
Google ❤️ Open Source for everyone.
-
Alibaba
Alibaba Open Source for everyone
-
D3
Data-Driven Documents codes.
-
Tencent
China tencent open source team.
from rosintegration.